





◆角速度の見える化
自動車には速さを知るためにスピードメーターが付いています。 同様にロボットにもスピードメーターを取り付けてみましょう。
先ほどと同じロボットを用意します。 長時間回転させるので、タイヤは浮かせた状態にします。モーターの負荷がなくなってしまうので、実践的なデータから離れてしまいます。もし広い場所が確保できる場合には、実際にロボットを走らせてみましょう。

こちらが角速度を測定するためのプログラムです。「角速度」とは角度の速度のことです。
回転センサーの差を計算して、グラフに描きます。モーターのパワーは0~100の範囲で0.1秒ごとに切り替えます。
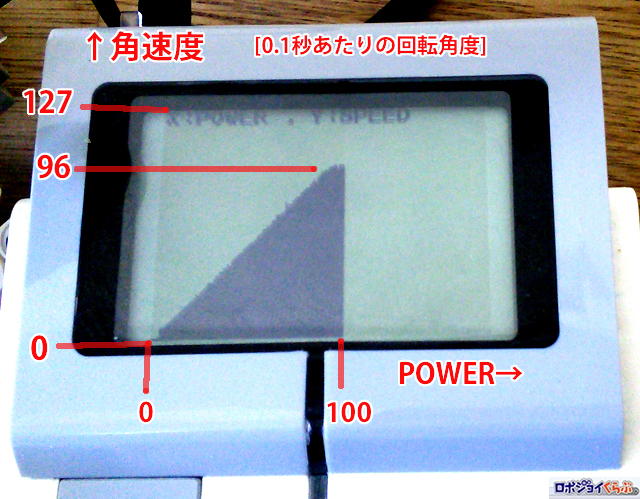
プログラムの実行結果は写真のとおりです。
見事、グラフが描かれました。X軸がパワーで、 Y軸が角速度です。
グラフはきちんと比例しているようですが、実際は違います。 グラフの右側、パワー95~100あたりで角速度が上がっていません。96度/0.1秒あたりで止まっています。
なぜ角速度が上がっていないのでしょうか? おそらくパワー95あたりで、実際のパワー(電力)が最大に達してしまい。モーターの性能以上に回転しない状態になっていると思います。
モーターが限界に達した時の角速度は0.1秒あたり約96度でした。単位を置き換えると960度/秒です。
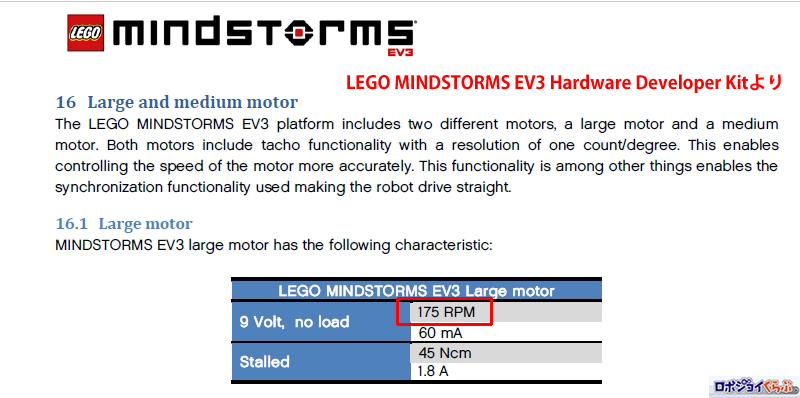
これをRPM(1分あたりの回転数)に変換すると、960×60÷360=160。つまり、160 RPMであるとわかりました。
「EV3 ハードウェア開発キット」によると、Lモーターの電気的な仕様として、9V通電時には176 RPMに達するそうです。充電式バッテリの場合、電圧は8~7Vくらいなので、 そのまま当てはめにくいのですが、仕様通りかそれ以上の性能を発揮しています。
見える化によって、モーターの性能をはっきりと確認することができました。
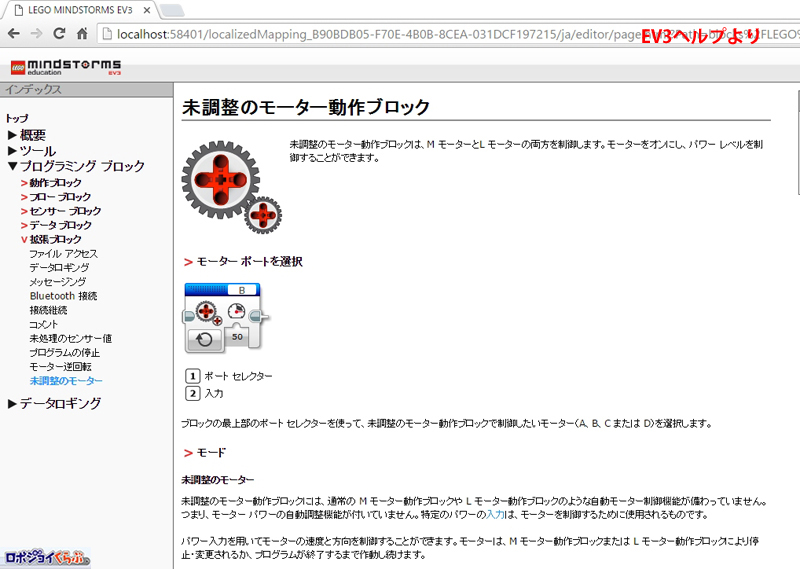
回転センサーを一切使わずにモーターを動かしたい場合には「未調整のモーター動作」というブロックを使います。これはRCX時代の古いモーターを動かすためのブロックですが、現在のモーターにも使うことができます。この場合の「パワー」は純粋に電気的なパワーの大きさを示しています。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。