





この連載では「教育版レゴマインドストームEV3」を使い、各種センサーをロボット競技に役立てるためのノウハウを紹介していきます。本当に役立てるためのには実際に手足を動かすしかありませんので、これを参考に実践してみましょう。なお、使用するプログラミング環境は「教育版EV3ソフトウェア」です。
◆前回のおさらい
前回は回転センサーについてお話をしました。 前回作成したプログラムは、一つは「60cm前進するプログラム」、、、
、、、そして、もう一つは「モーターの角速度を測定するプログラム」でした。

この2つのプログラムと前回で使用したロボットをそのまま使います。このロボットは出力ポートAにLモーターを接続しています。モーターは1つだけなので、前進後退のみで右折・左折ができません。
◆回転センサーで移動速度を測る

前回、作成した「60cm前進するプログラム」と「モーターの角速度を測定するプログラム」。この2つを合体させて1つのプログラムにしました。完成したプログラムがこちらです(fow600mm2.ev3)。
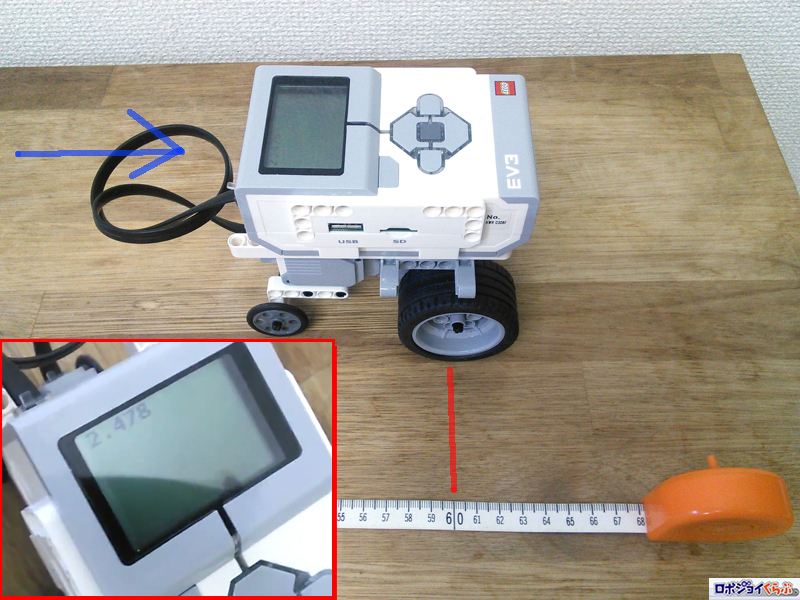
60cm前進する処理と角速度の測定を並列的に処理します。並列的に処理を行うには写真のようにワイヤーを二股にしてブロックを接続します。

では、プログラムを実行します。

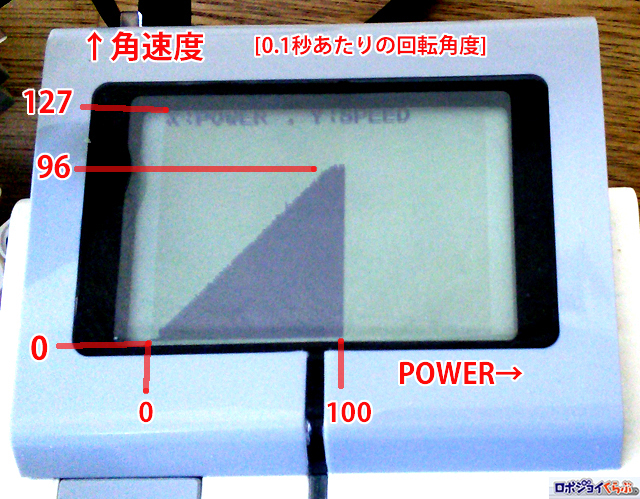
液晶ディスプレイにグラフが表示されました。
グラフのX軸は時間です。1ピクセルが0.025秒に相当します。グラフの終わった地点が約2.4秒を示しています。Y軸は角速度(時間あたりの回転角度)です。ややこしいですが、0.025秒間に回転した角度を測定して、それを4倍したピクセル数で描いています。計算すると、Y軸の一番上が1280度/秒(213 RPM)に相当します。見たところ下側4割くらいが埋まっていますので、85 RPMくらいでしょうか。前回の測定ではパワー100で160 RPMだったので、パワー50で85 RPM相当というのは、ほぼ計算どおりです。
このグラフを見ただけだと、特に問題点は見当たらないと思います。そこで、さらに見える化を推し進めたいと思います。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。