





◆ロボットがグラッとして止まる証拠
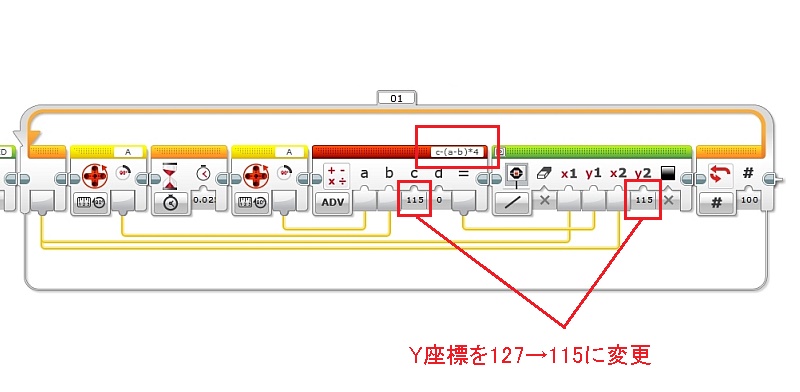
さきほどのプログラムを改良しました(fow600mm3.ev3)。改良したのはグラフの原点です。算出するY座標を変更することでグラフ全体が12ピクセルほど上に移動しました。

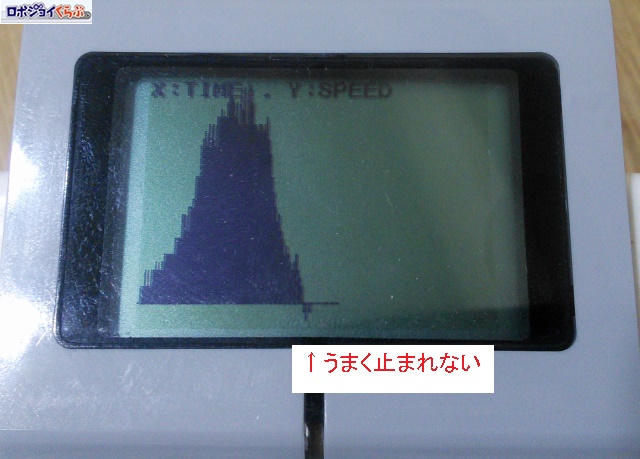
実行後の結果がこちらです。Y座標の0位置を少しだけ上に移動させました。この変更によってY座の上限が193 RPMに変わりました。
注目すべきはグラフの最後の部分です。 角速度(Y軸)の値がゴール直前でマイナスを示しています。回転センサーがとらえたモーターが逆に回っている証拠です。
つまり、ロボットが目標地点をオーバーランして戻っているということです。 実際に見ると、ロボットがグラッとして止まる様子が確認できます。
◆ロボットをゆっくり止める
ロボットがグラッと止まることが分かりましたので、これをなくしたいと思います。
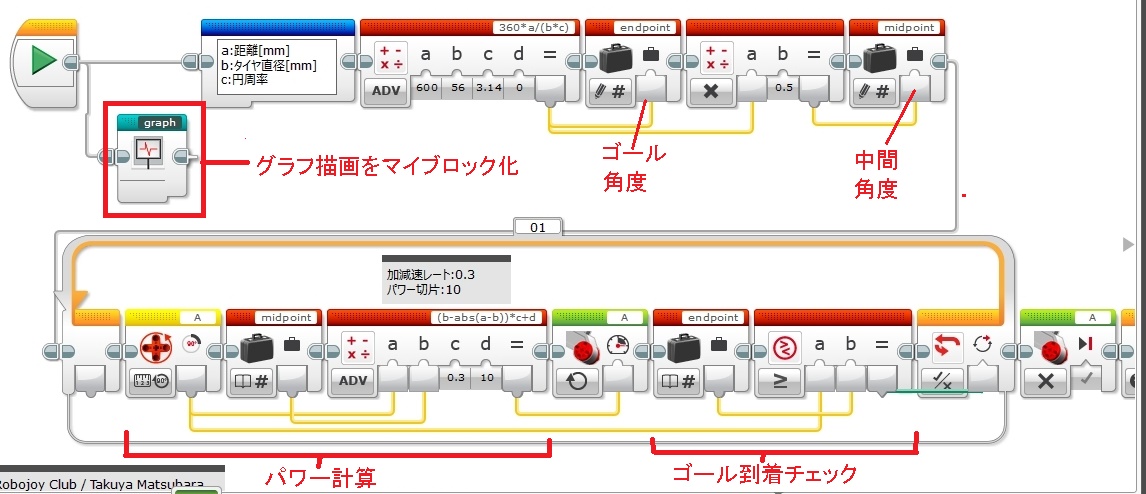
改良したプログラムがこちらです(fow600mm4.ev3)。モーターのパワーを自前のプログラムで制御するように変更しました。プログラムが巨大化したので、グラフ描画に関するプログラムはマイブロックに移行させました。
プログラムを実行した結果がこちらです。
ロボットが停止時にグラッとなる現象が少し収まりました。ロボットの加速と減速もゆるやかになりました。 急発進/急停止をしないことで動きが正確になります。さらに0.1~0.2秒ほどゴールへの到着が早くなっています。
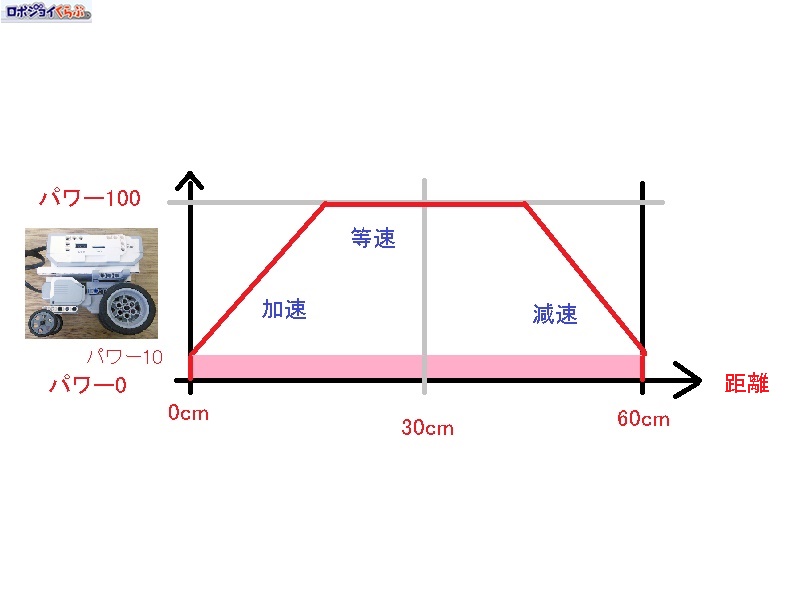
このプログラムでは「加速」「等速」「減速」の3段階でモーターの回転速度を制御しています。 等速時にはパワー100で回転します。
ピンク色で塗った部分はモーターを回転させるさいの最低限のパワーです。ここではパワー10と設定しました。このパワーが0だとスタート時にモーターが回らず動いてくれません。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。