





◆加速減速レートの調整
しかし、最後に逆回転する現象は完全に解決していません。
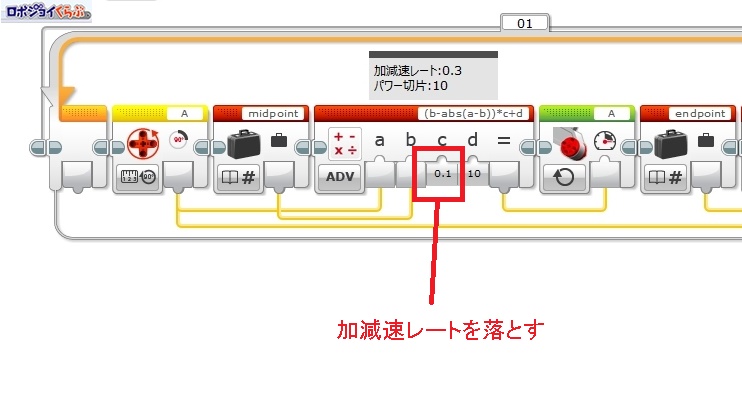
そこで、先ほどのプログラムを改良します。 加速減速レートを0.3→0.1に変更してみました。モーターの回転が遅くなれば逆回転が発生しなくなると予想したためです。
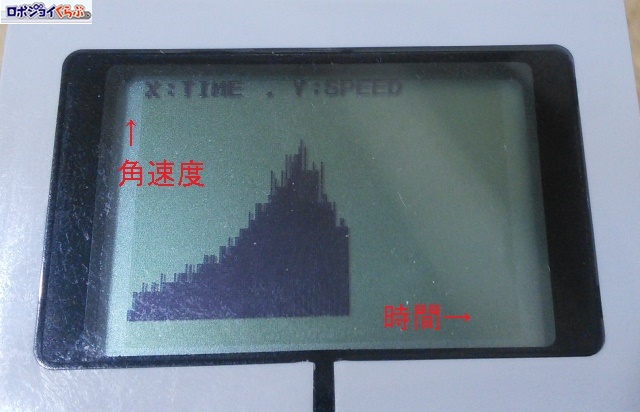
プログラムの実行結果がこちらです。
予想どおり、逆回転が発生しなくなりました。一応、これで解決になるのですが、ゴールへの到着が前よりも遅くなってしまいました。
あと、細かい話ですがグラフが左右対称ではないので気持ちが悪いです。
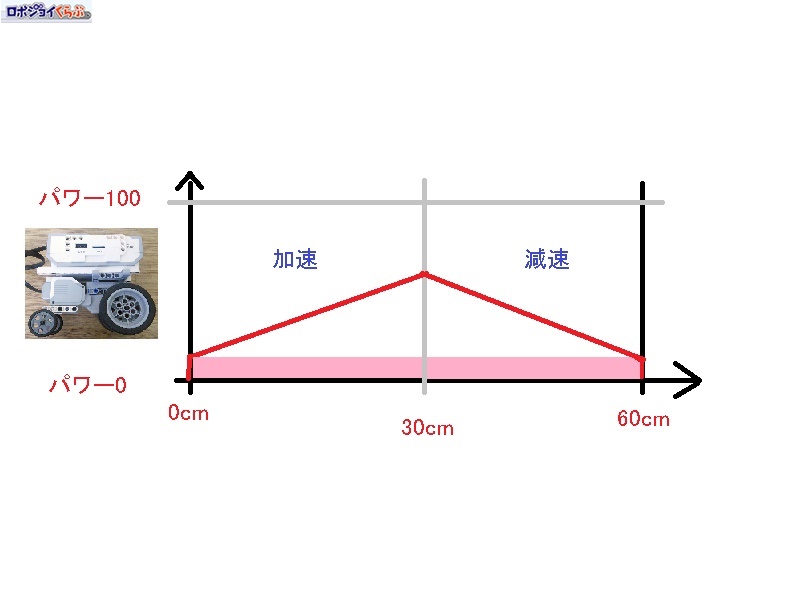
距離とパワーの関係をグラフにすると、こうなります。 加速減速レートが低いとパワーは100%に達しないので、台形にはなりません。
モーターのパワーが弱すぎたため、ロボットの加速に時間がかかりすぎて、グラフのバランスが悪くなったようです。
◆完成したプログラム
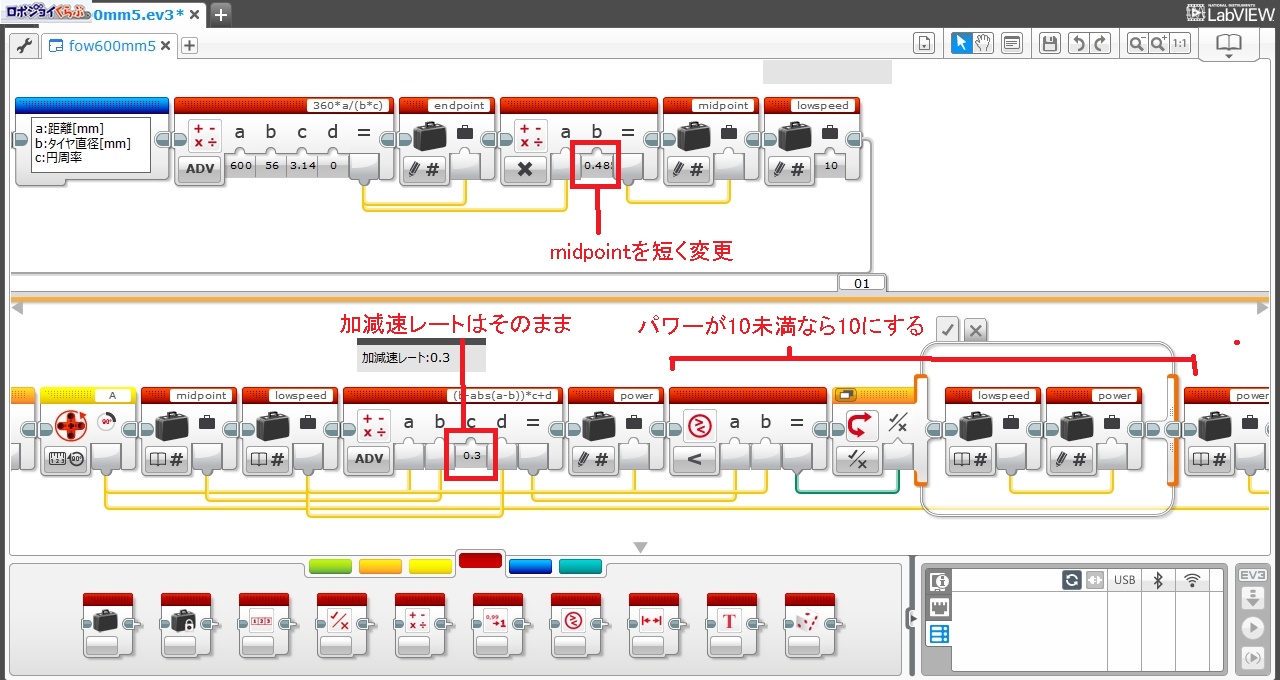
最終的に完成したプログラムがこちらです(fow600mm5.ev3)。
改良点としては、モーターブロックの「オフ」の設定を「ブレーキ」じゃなくて「惰性運転」に変更しました。加速減速レートは最初の0.3に戻しています。
ブレーキをかけると、その場に踏み止まろうとしてモーターの逆回転が発生してしまいます。惰性運転に変更すれば、逆回転はなくなりますが、今度はモーターが正確な位置に止まれません。ジレンマに悩まされます。
解決策としては、ゴール地点を実際よりも手前に設定してモーターの回転を早めに落とすようにしてみました。 減速の基準となる回転センサーの角度は「midpoint」という変数で設定していますので、プログラム内で探してみましょう。
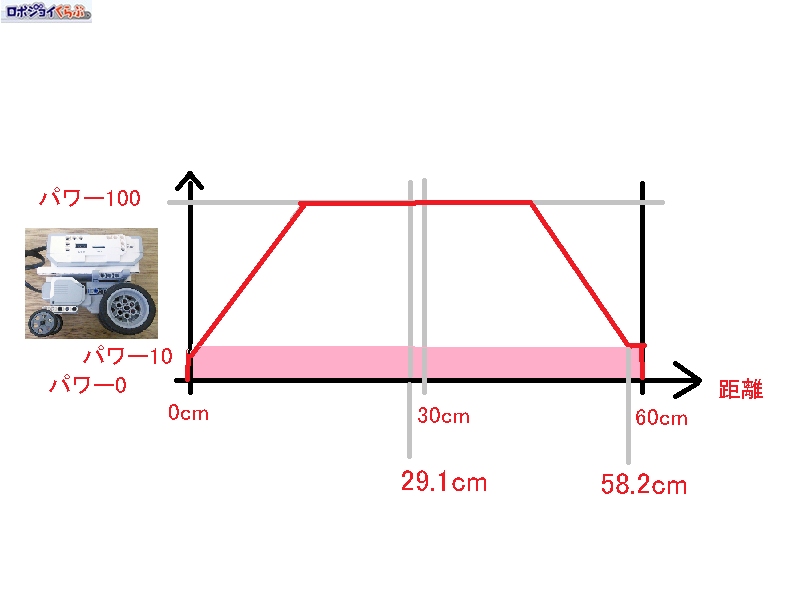
距離とパワーのグラフで表現するとこうなります。
このプログラムではゴールの1.8cm手前でパワー10の等速運動に切り替わります。
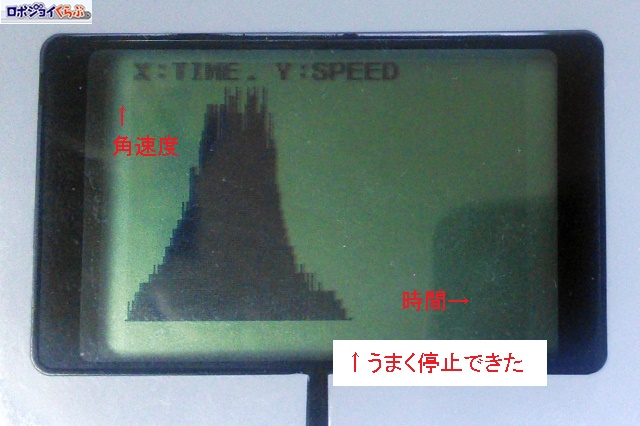
プログラムの実行結果はこのとおりです。
逆回転もなく、ゆっくり停止できるようになりました。
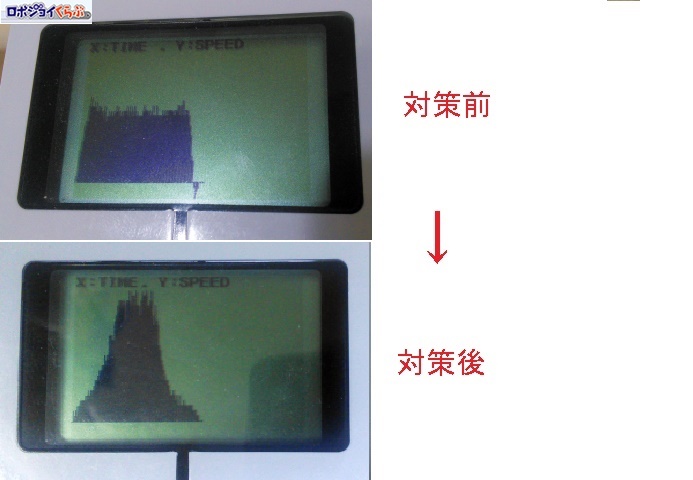
対策前と対策後を比べてみました。解決しましたが、少々不満があります。ゴールへの到着時間が変わっていません。加速減速レートやmidpointの値をうまく設定すれば改善するかもしれません。
[DOWNLOAD]今回作成したプログラム(教育版EV3ソフトウェア用)
[LINK]2015年10月に私が書いたマイスターブログも参考になると思います。ロボットの正確な移動方法について紹介しています。
http://nxt.typepad.jp/robojoy/2015/10/forward200mm.html


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。