





この連載では「教育版レゴマインドストームEV3」を使い、各種センサーをロボット競技に役立てるためのノウハウを紹介していきます。本当に役立てるためのには実際に手足を動かすしかありませんので、これを参考に実践してみましょう。なお、使用するプログラミング環境は「教育版EV3ソフトウェア」です。

今回使用するのはEV3用の「超音波センサー」です。超音波センサーについては過去に別の連載で紹介していますので省略します。NXT用の超音波センサーと違ってミリメートル(mm)単位で測定できるようになっていたりと、性能が向上しています。
結論から言いますと、超音波センサーは測定値の誤差が非常に大きいです。誤差が発生すると値の土台が根こそぎ崩れてしまいますので、いくらセンサーの精度が高くても意味がありません。
そこで、超音波センサーの誤差について検証してみたいと思います。どういう状況での利用がふさわしいかを考えてみましょう。
ロボットを用意します。
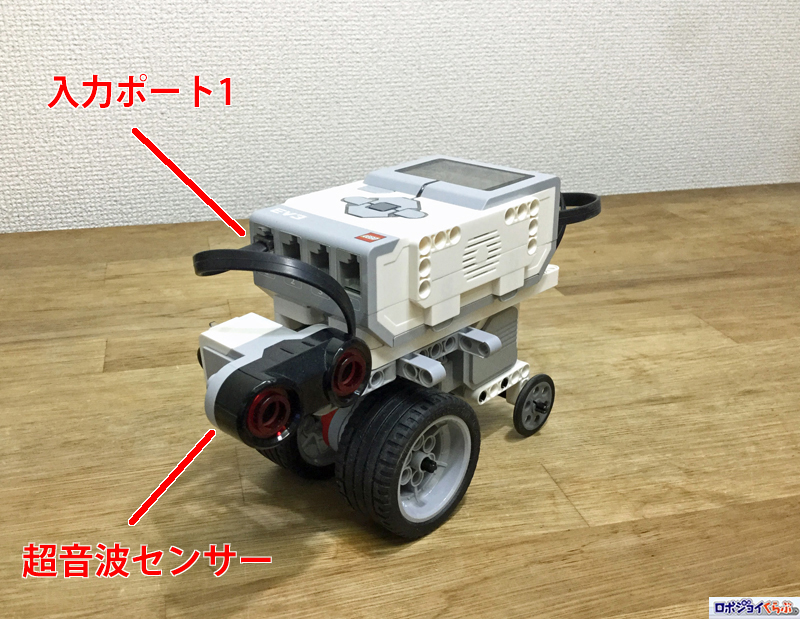
前回、使用したロボットをそのまま使います。 入力ポート1に超音波センサーを接続します。 超音波センサーは進行方向に対して90横向きに取り付けます。
実験用のフィールドを用意します。
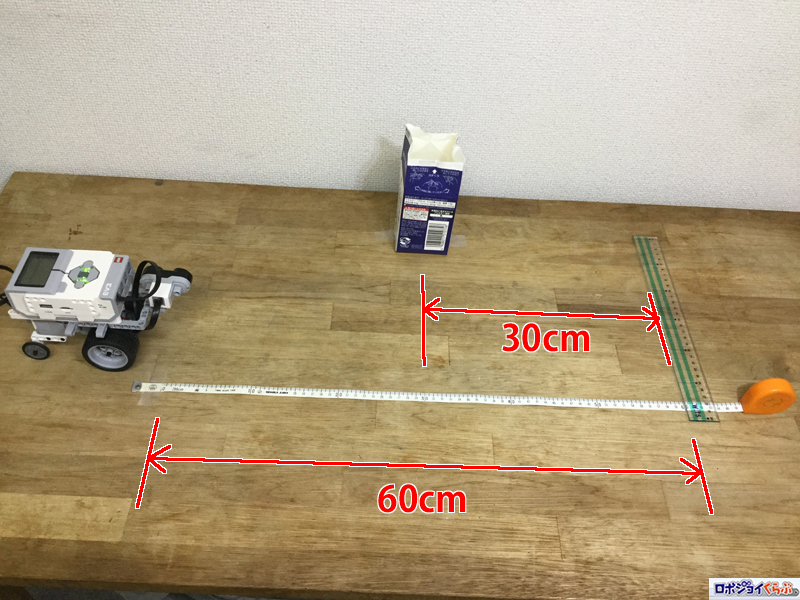
空きの牛乳の紙パックを用意して、スタートから30cmの地点に置きます。スタートからゴールまでの中間の位置です。

ロボットを手で動かしてみた様子です。
紙パックと超音波センサーとの距離は15cmになりました。正しく測定できれば、測定値は「15.0」となるはずです。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。