





◆誤差を見える化する
プログラムを作成してみました。
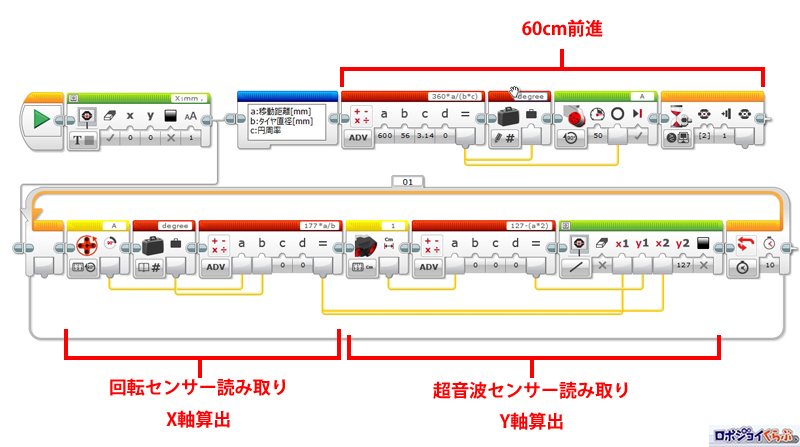
この連載では常に問題点を見える化することをおすすめしています。そこで、超音波センサーで測定を行ってグラフを描きます。プログラム2つの処理を並列的に動かしています。 1つはロボットを60cm前進させる処理です。もう1つはグラフを描く処理です。
グラフを描くには2つのセンサーから値を取り出します。 回転センサーの測定値をX座標に割り当てます。そして、超音波センサーの測定値をY座標に割り当てます。
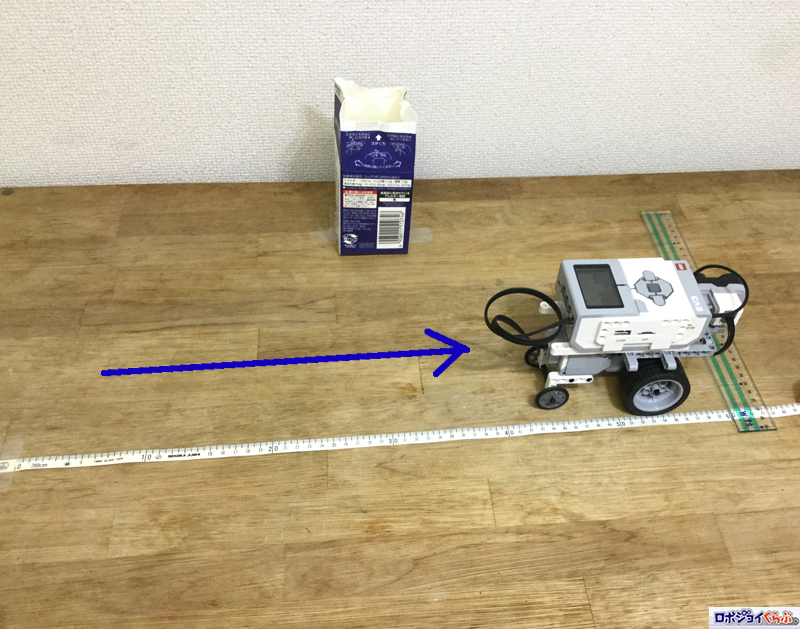
では、プログラムを実行します。
ロボットが60cm進んで止まりました。
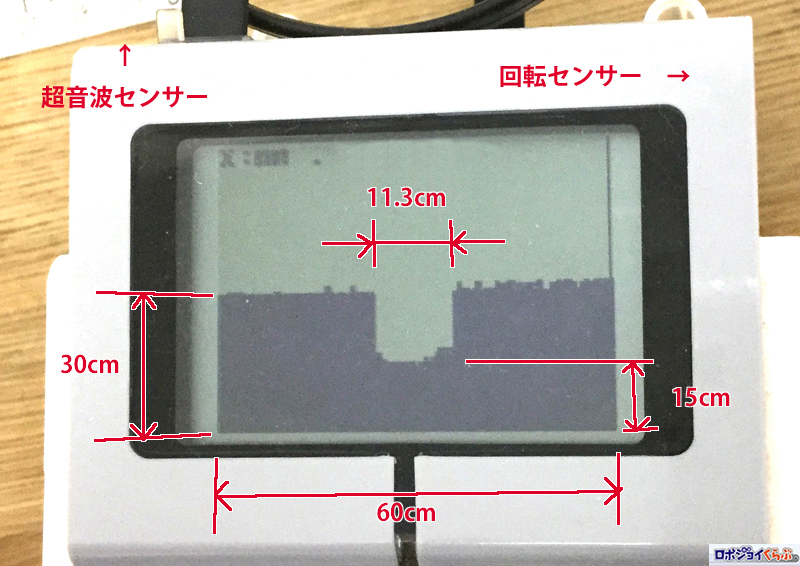
実行した結果です。 液晶ディスプレイにグラフが表示されました。
グラフのX座標がロボットの移動距離です。画面の左側端が0cm、画面の右端が60cmを示しています。
Y座標方向が超音波センサーの測定した距離です。1cmの長さが2ピクセルに相当します。
超音波センサーはX座標方向で11cmくらいの範囲で反応しています。ぴったり7cm(紙パックの幅)だけ反応するというわけではありませんでした。
Y座標方向を見てみると、測定した距離は15cm~19cmくらいを示しています。超音波センサーの値は安定していません。本来は15cmで安定していて欲しいです。
何度か同じ条件で測定してみましたが、結果は同じです。距離が安定していません。ガタガタとしたグラフが描かれます。
こうなる原因は、超音波が斜め方向に飛んでいて、はね返った距離を測っているものと思われます。誤動作というわけではないのですが、15cmだったり19cmだったりと、値が安定していません。
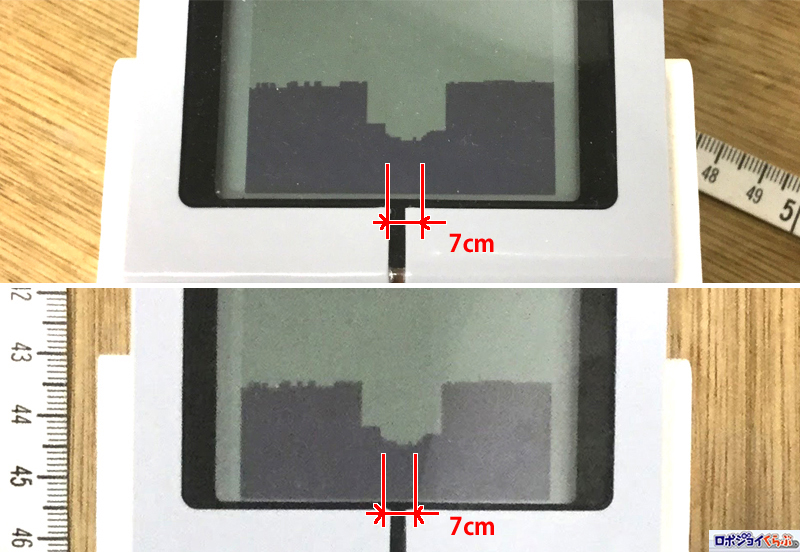
見たところ、紙パックを通過している幅7cmの範囲では超音波センサーの値は15cmで安定しています。しっかり対象物の正面から超音波を当てないと正確に測ることができないということが分かります。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。