





◆タイミングの見える化
先ほどの実験では紙パックを通過しているタイミングが分かりにくかったので、ロボットを改良してみました。
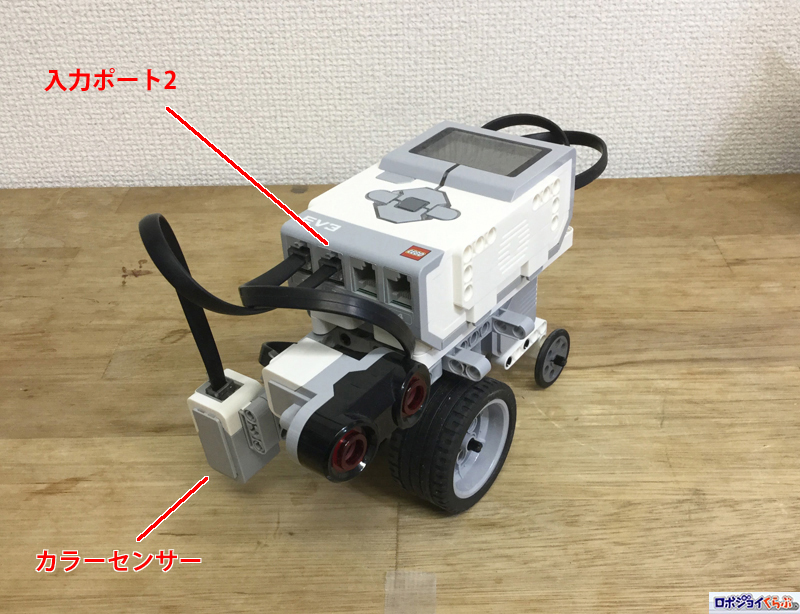
EV3用の入力ポート2にカラーセンサーを接続します。カラーセンサーの窓を床面に向けて、超音波センサーの近くに取り付けます。カラーセンサーについては別の機会に詳しく紹介します。
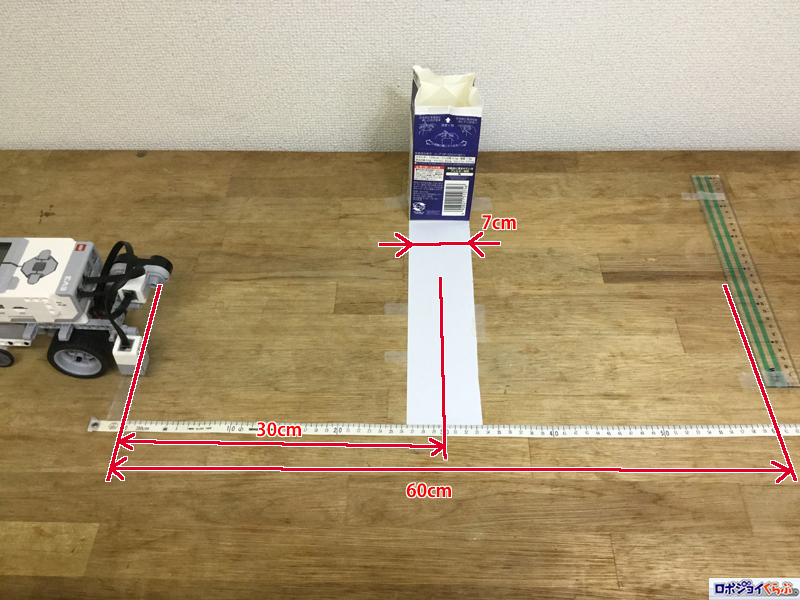
実験用のフィールドも改良します。
紙パックと同じ位置に幅7cmの白い紙を置きます。紙が動かないようにテープで固定しています。
これでロボットが通過すれば紙パックに向いているタイミングを確認することができます。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。