





◆ラインの上に戻る
ここからが本題です。ラインの真上にカラーセンサーがくる位置でロボットを停止させます。
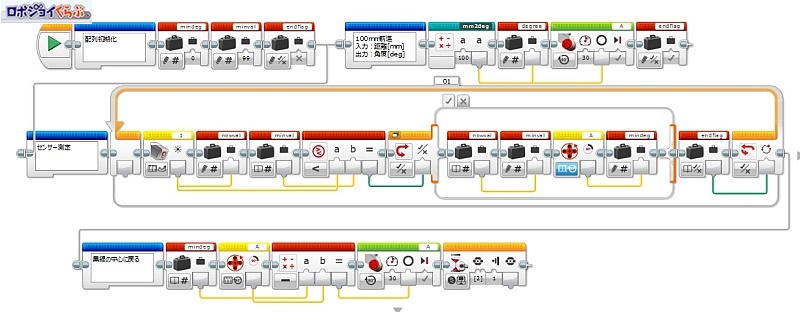
プログラムを考えてみました(color2.ev3)。 本来はカラーセンサーの最大値と最小値を求めてから、中間のしきい値を求めて、線の位置と幅を求めます。ロボットは一度ラインを通過してからバックして戻る必要があります。
ただし、この方法だとプログラムがすごい量になってしまいます。そこで、ここではセンサーの最低値だけを求めます。
最低値が発生した場合、その瞬間のモーターの角度を変数に格納しておきます。これで、指定の位置に戻ることができるようになります。
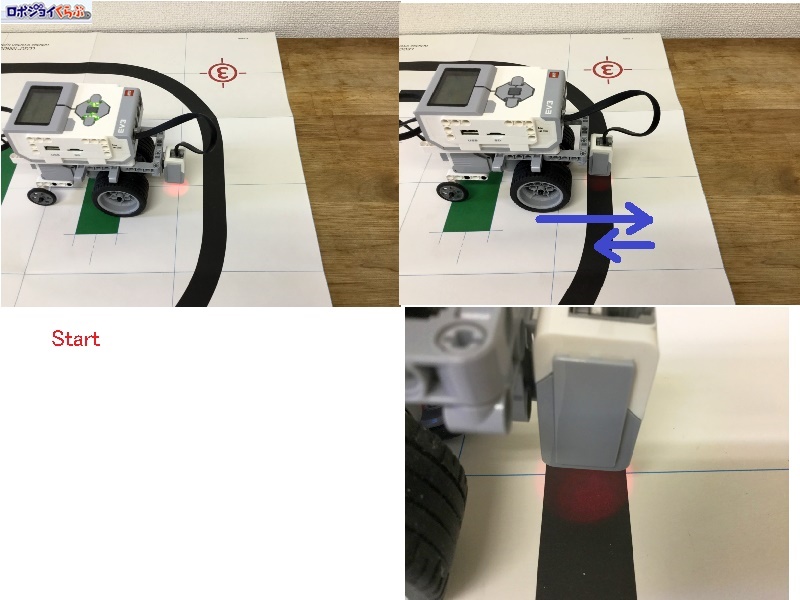
プログラムを実行してみましょう。
ロボットが100mmほど前進します。途中でロボットはラインを一度通過します。それからバックで戻ってラインの真上で止まりました。成功です。センサーの最低値=黒線の中心であることが確認できました。
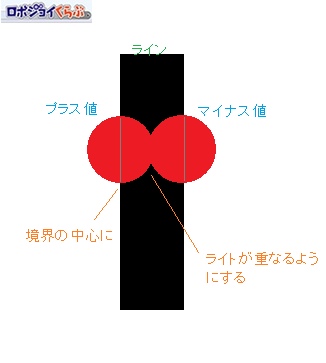
ちなみにライントレースロボットを作る場合には図のような位置にカラーセンサー(反射光モード)を配置して、ラインを追従するという方法があります。この場合、ライトの光が当たる白黒の比率が50対50になるように走ります。
センサー1個だけでも作れますが、大きい誤差に対応するにはセンサー2個のほうが確実です。2つセンサーを使う場合にはどちらか片方の値の符号(プラス・マイナス)を反転して使います。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。