





◆比例制御のライントレース
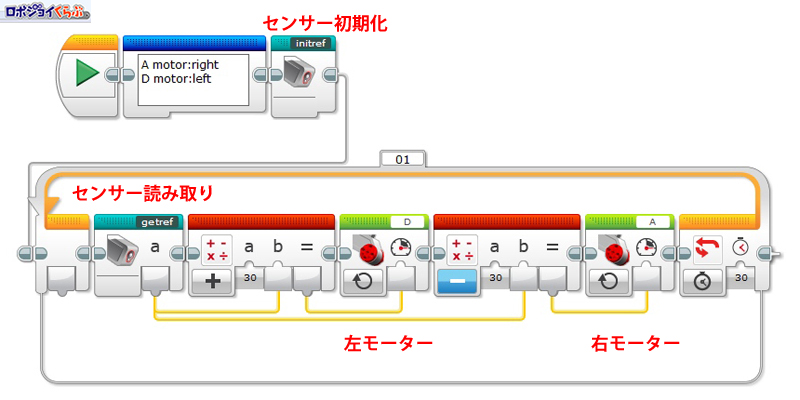
最後にライントレースのプログラムを作ってみました(trace3.ev3)。
センサーの値をそのまま左右のモーターのパワーに割り振っています。センサーの値が0から離れるほどパワーの変化量も大きくなります。これが比例制御です。
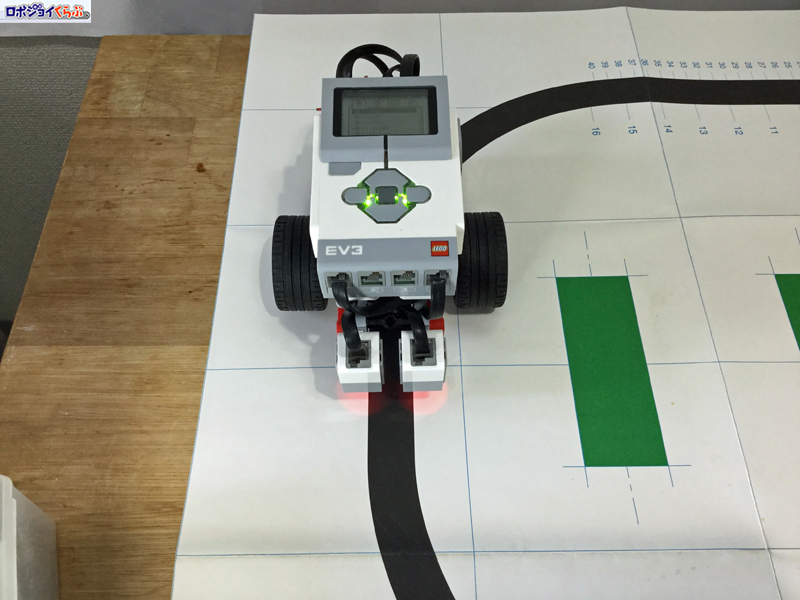
ラインの中心にロボットを置いて実行します。 30秒間走ったら自動的に止まります。 ロボットがガクガクせず、なめらかにラインを追跡している点に注目です。比例制御の特徴です。
極限までプログラムをシンプルにしましたので、コースアウトしやすいかもしれません。 コースアウトを防ぐにはセンサーの値を掛け算で大きくして、パワーの変化量を増やしましょう。 パワー全体を底上げすると、ロボットの移動速度も上がります。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。