





◆カラーセンサーの信頼度を測定

EV3カラーセンサーの信頼度を確認するため、このようなフィールドを用意しました。 6×4ポッチの赤色のブロックをカラーセンサーの手前に置きます。 カラーセンサーはブロックに当てて、きょりを0cmにしておきます。
毎度の繰り返しになりますが、ロボット作りの問題は「見える化」で解決しましょう。今回はカラーセンサーの特性を見える化したいと思います。
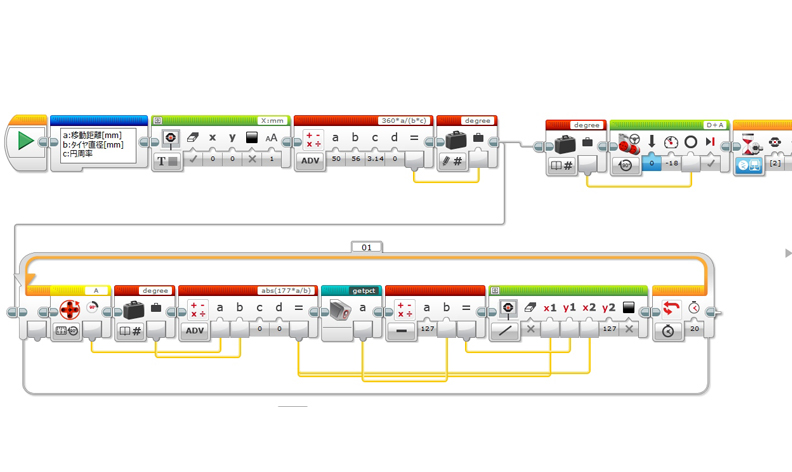
カラーセンサーの「信頼度」を測定するプログラムがこちらです(color1.ev3)。
マイブロックでカラーセンサーの信頼度を求めてグラフを描きます。
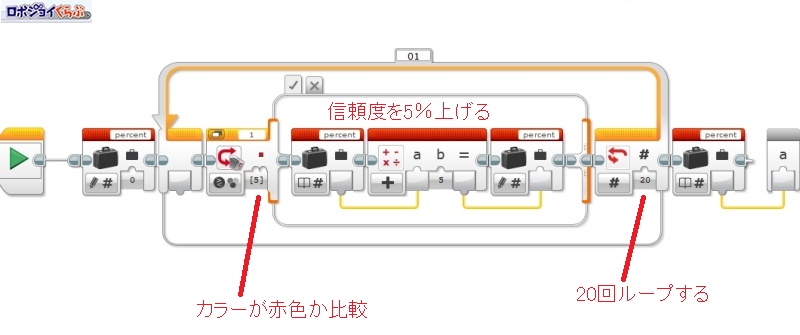
マイブロックの中身です。ここでカラーセンサーの信頼度(0~100%)を求めます。信頼度を求める方法は自己流です。カラーセンサーを繰り返し測定して、正解(赤色を検出)した回数を信頼度としています。 測定回数を100回にすると処理に時間がかかりすぎるので、20回に減らしています。
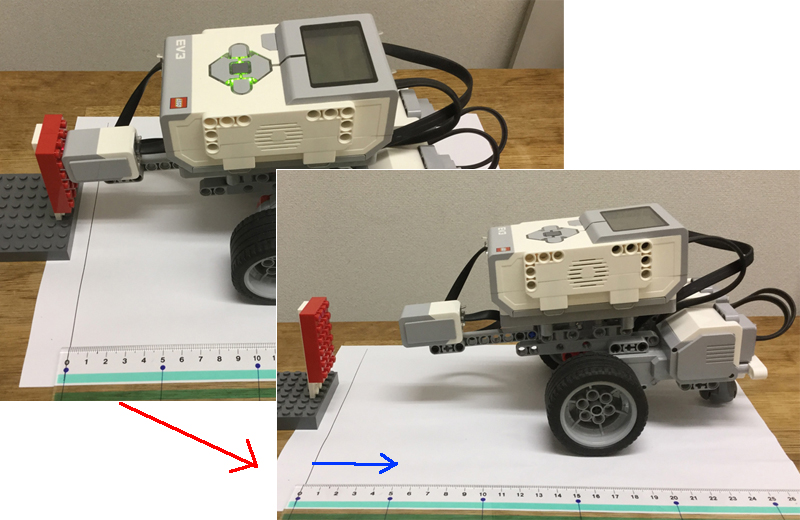
プログラムを実行すると、ロボットが5cm後退します。
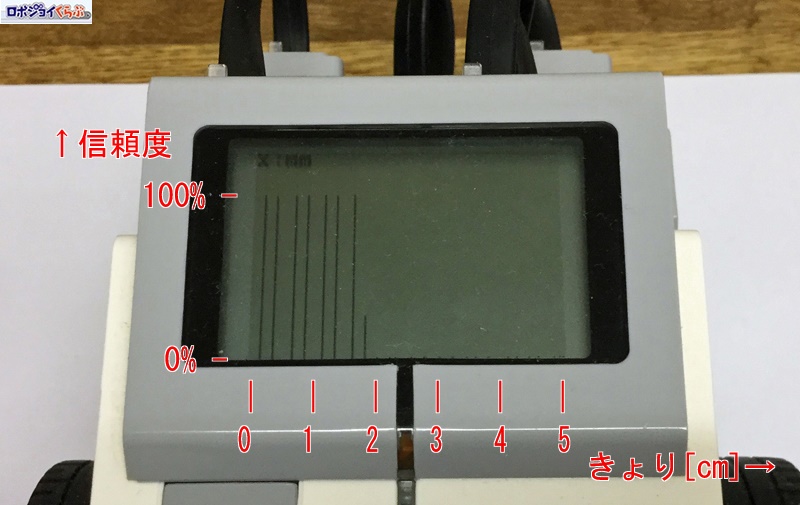
ディスプレイにグラフが表示されました。
X軸が移動したきょり(0cm~5cm)です。 Y軸がカラーセンサーの信頼度(0~100%)です。 完全に赤色と検出できた場合は信頼度が100%になります。
ブロックとセンサーのきょりが1.7cmくらいまでは100%の信頼度を維持しています。
あと、このグラフですがX軸側にすき間が多すぎて、測定が抜けてしまっています。これはロボットの移動速度が速すぎることが原因です。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。