





◆ソフトウェア的に超低速移動させる
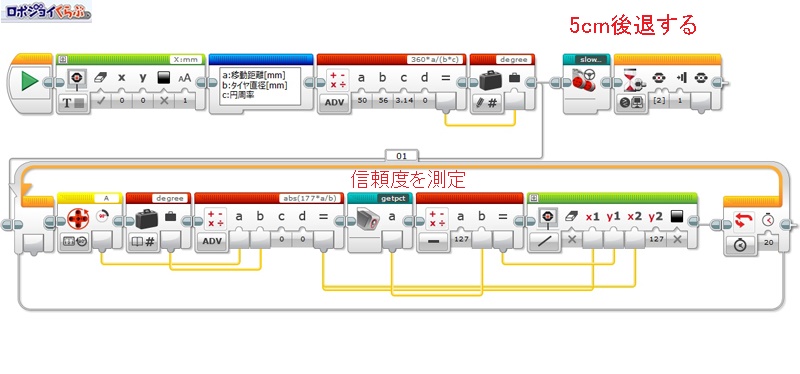
先ほどのプログラムのグラフを改善して、グラフの密度を上げてみました(color2.ev3)。
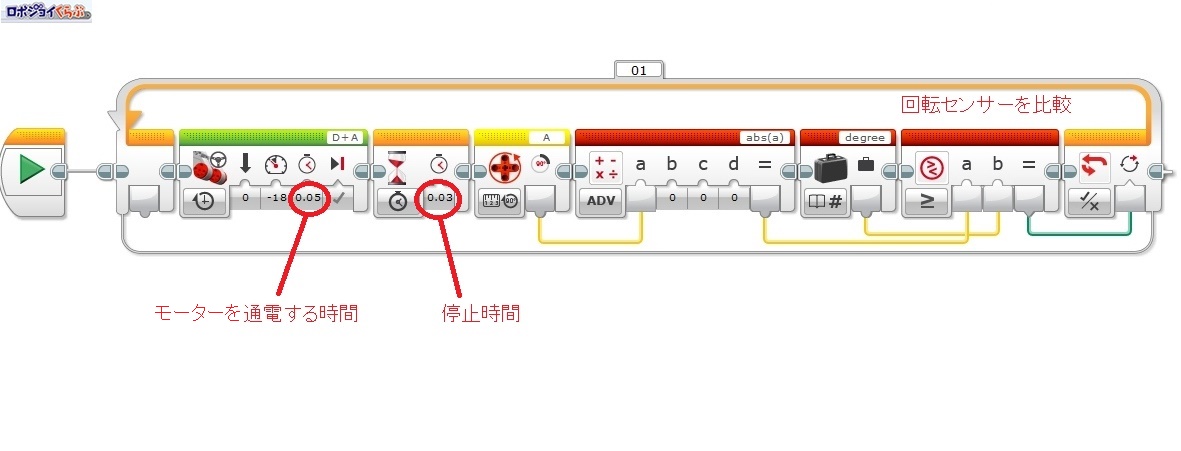
ロボットを超低速に移動させるマイブロックです。 ロボットを遅く移動させる一番簡単な方法はモーター制御のパワーの値を減らすことです。ですが、ここでは図のような方法で回転を遅らせてみました。モーターを回転と待機を高速に繰り返すことで、回転を遅らせています。
以上の変更によって、移動時間を約1秒→約14秒に引き伸ばすことができました。
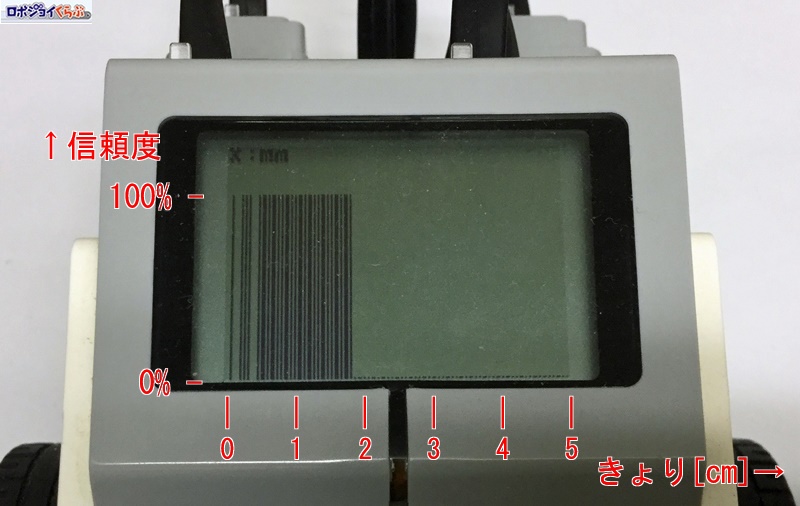
プログラムの実行結果です。このグラフを見ると、0~1.8cmまでは信頼度が100%であることがわかります。
前回よりもロボットの移動速度が1/10以下に落ちましたので、グラフの密度は10倍以上に上がっています。それでも隙間がありますが、これは測定に時間がかかりすぎて回転センサーの値が飛び飛びになっているからです。
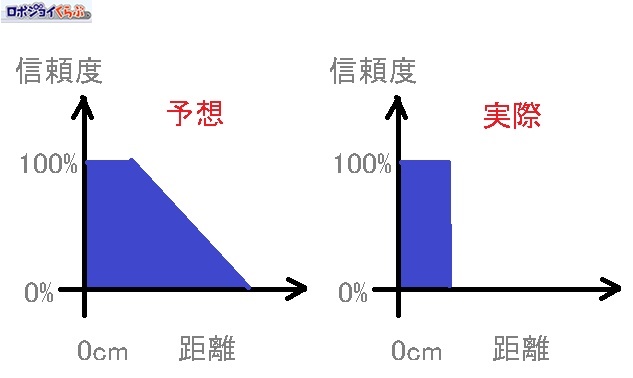
自分の予想では、センサーが遠くなると信頼度が少しずつ落ちていくと考えていました。しかし、実際の結果では、信頼度はほぼすべて0%か100%かのどちらかです。
なぜここまで急激に信頼度が落ちるのか。理由は不明です。LEDの光が届かなくなって、測定不能に落ちてしまっているのではないかと考えています。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。