





カム機構には、従動節にいろいろな動きをさせるために多くの種類があります。
大きく分類すると、平面内で運動する平面カムと、立体内を運動する立体カムに分けられます。
平面カムと立体カムにもそれぞれ色々な種類があります。
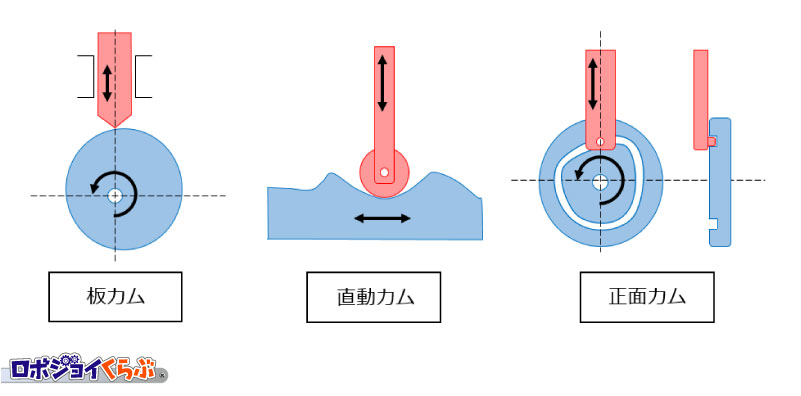
平面カムには、板カム、直動カム、正面カムなどがあります。
板カム・・・特殊な形状の板を回転させて、従動節に上下の往復運動をさせる
直動カム・・・特殊な形状のカムを左右に往復運動させて、従動節に上下の往復運動をさせる
正面カム・・・板の側面に溝を作り、従動節の先端を接触させて運動を伝える
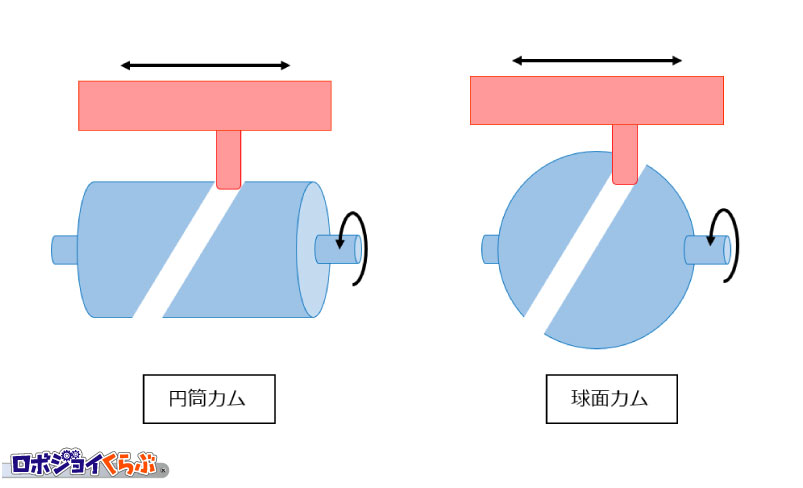
立体カムには、円筒カム、球面カムなどがあります。
円筒カム・・・円筒の側面に溝を作り、従動節の先端を接触させて運動を伝える
球面カム・・・球面に溝を作り、従動節の先端を接触させて運動を伝える
私たちの身近にある例では、自動車のエンジンや遊園地のメリーゴーランドなどに使われています。
では、実際に問題を解きながら、どのようなしくみか確認してみましょう。
問題では次のパーツを使用します。問題によって使用するパーツ、使用しないパーツがあります。
 3・5・9ビーム |
各2個 | 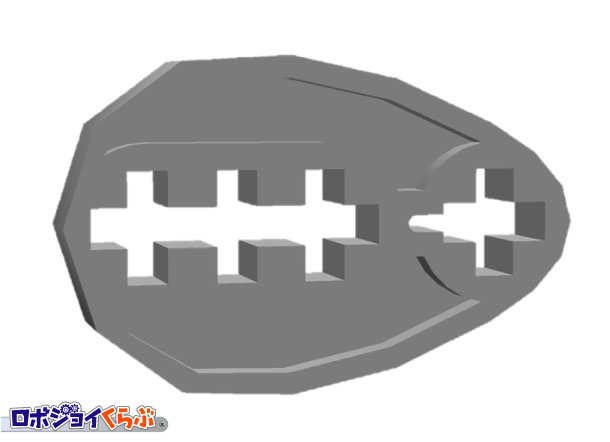 |
2個 |  20・ギア |
1個 |  かさ歯車 |
1個 |
 長さ:3・5・7・9 |
各5個 |  コネクタ類 |
各4個 |  固定ペグ |
4個 |  |
10個 |
【問題1】

左のパーツを使い、設置されている従動節(5・ビーム)を5回上下運動させるためにはどうすればよいでしょうか?
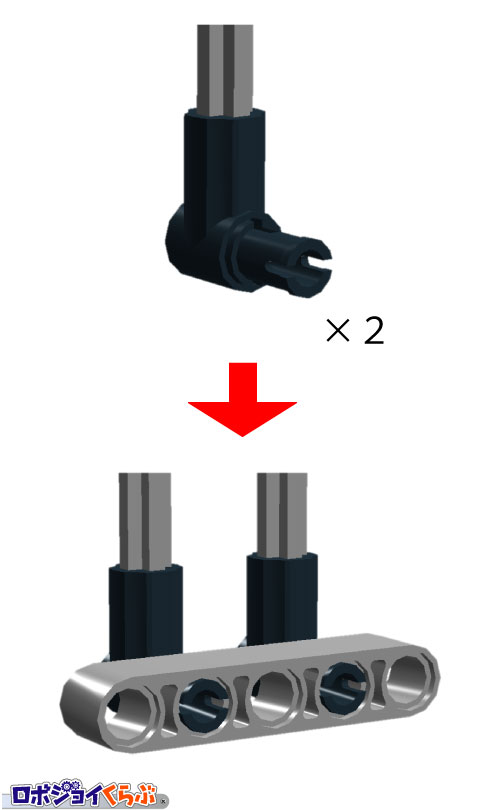
《設置されているビーム部分の作り方》
1.固定ペグとコネクタを左図の上のように組み合わせて下さい。
2.その組み合わせを2つ作り、先端の固定ペグをビームと組み合わせると左図の下のようになります。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。