





◆つかんで持ち上げる仕組み
次に、つかんだ後さらに持ち上げる仕組みを紹介します。
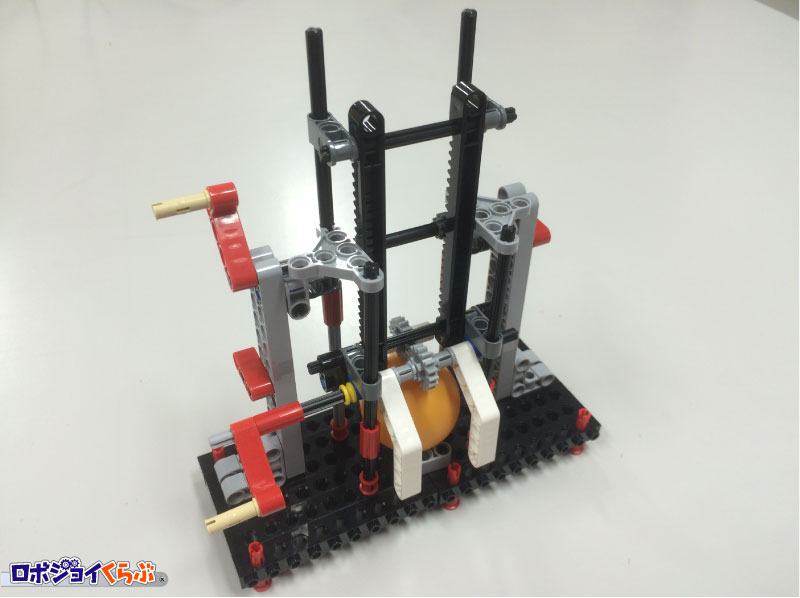
つかんで持ち上げる仕組みは、歯車とラック&ピニオンによって行います。左図がその仕組みです。
つかむ仕組みは歯車を使用し、持ち上げる仕組みはラック&ピニオンを使用します。物をつかんだ後、そのまま真上に持ち上げるUFOキャッチャーのような仕組みです。
つかむ仕組み:歯車
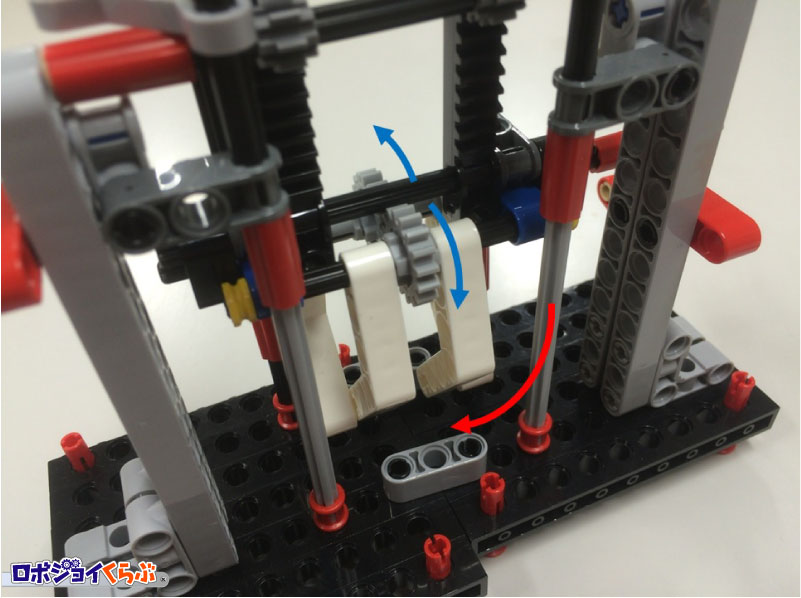
つかむ仕組みは、歯車を使用しています。
2つの歯車を使うことで、1つが時計回りに回るとすると、歯の噛み合いによってもう1つの歯車が反時計回りに回ります。
これによって、つかんで放す動きをします。
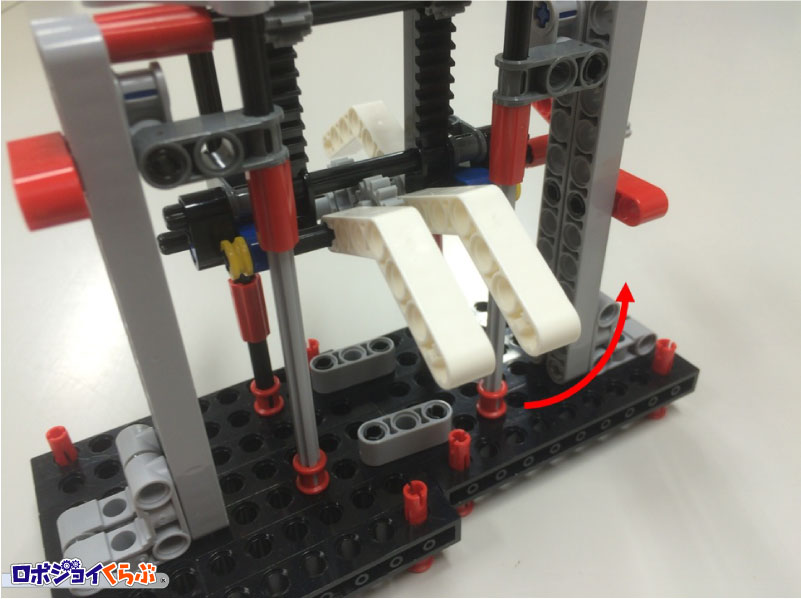
左図は、つかんだときの様子と、放したときの様子です。
持ち上げる仕組み:ラック&ピニオン
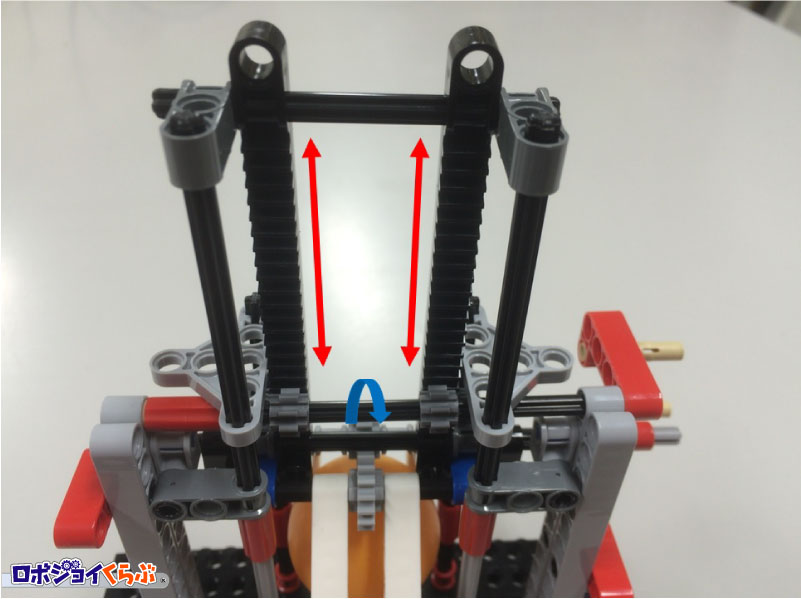
持ち上げる仕組みは、ラック&ピニオンを使用しています。
ラック&ピニオンは、回転運動を平行運動に変え、平行運動を回転運動に変えることができる機構でした。
ピニオンの軸を固定し、ピニオンの回転によってラックが上下に動くような仕組みとなっています。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。