





レゴマインドストームNXTのプログラム開発環境「NXTソフトウェア」について紹介していくコーナーです。
前回と前々回では「センサー」と「モーター」について紹介をしてきました。そこで、今回はその2つを
組み合わせて、簡単なロボットを作ってみたいと思います(文/松原 拓也)。
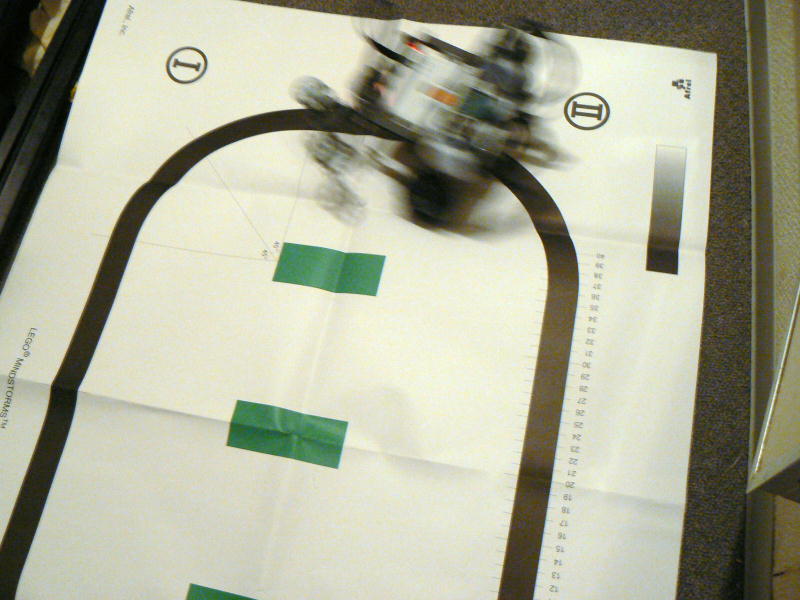
簡単に作れるロボットとして、代表的なものが「ライントレースロボット」です。ライントレースロボットとは、線の上をなぞって(トレースして)走るロボットのことです。
この「線の上を走る」という技術は、ロボット競技の世界でも
盛んに取り入れられています。
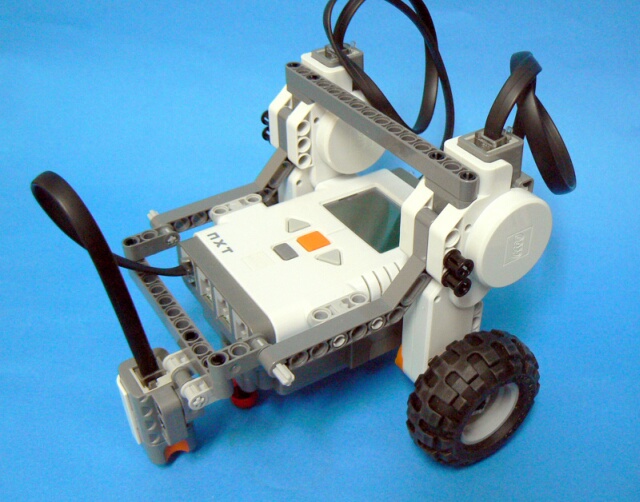
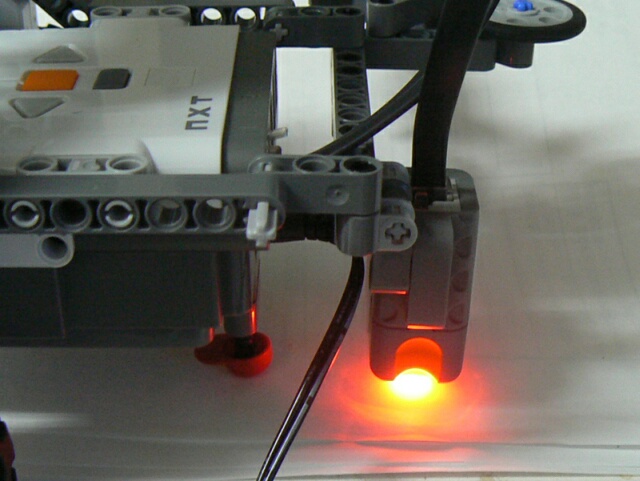
まずは、ロボットを組み立てます。インテリジェントブロック1個、
モーター2個、ライトセンサー1個を用意してください。
モーターは出力ポートAとポートCに接続します。
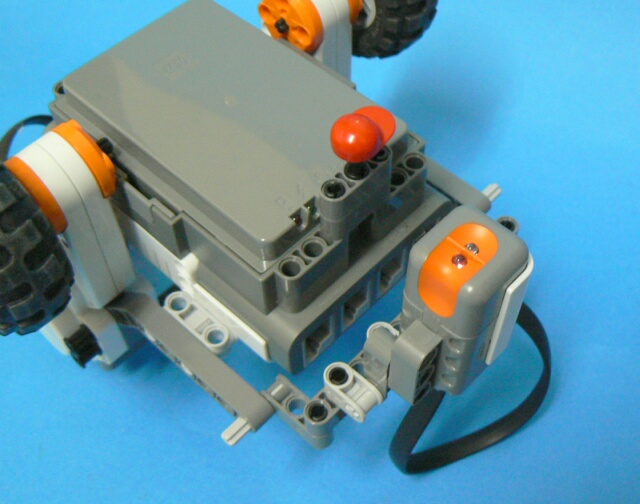
ライトセンサーは入力ポート1に接続します。このセンサーを
使って、床面の「白」と「黒」を判別します。
赤い部分のパーツはミニフィグ用の帽子です。一般用のNXTには入っていませんので、似た部品で代用してください。
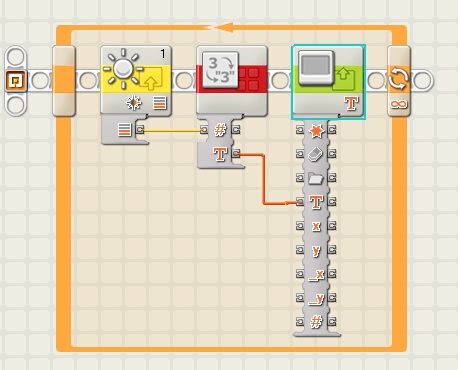
まずはライトセンサーの特性を調べるために、NXTソフトウェアを使って簡単なプログラムを作ってみました。
[DOWNLOAD]作成したプログラム(NXTソフトウェア用)
プログラムを実行すると、ライトセンサーのカウント値が表示されます。
センサーに入る光が多い(明るい)ほど、カウント値が大きくなります。
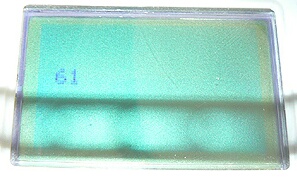
製品に付属するライントレース用のシートでカウント値を
測ってみた結果がこちらです。
「白」と「黒」で約30カウントの差が見られました。
なお、ライトセンサーと床面の距離は約7mmに合わせています。
これはライトセンサーと床面との距離に対しての測定値の変化を表したグラフです(色は白)。
同じ「白」でも距離が違うだけで、こんなにも測定値が変わってしまいます。
センサーは近付きすぎると正しく測定できません。 センサーの距離はできるだけ均一に保つようにしたほうがようさそうです。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。