





◆プログラムその2~3
先ほど作ったプログラムでは、ロボットの動きがガクガクしていたので直したいと思います。
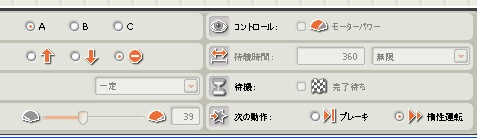
「次の動作」のラジオボタンを「惰性運転」にセットします。
[DOWNLOAD]作成したプログラムその2(NXTソフトウェア用)
こうすることによって、モーターが停止後も惰性で回転するので
ガクガクした動きが薄れると思います。
さらにプログラムを改良したのがこちらです。
[DOWNLOAD]作成したプログラムその3(NXTソフトウェア用)
スイッチ(分岐)ブロックがなくなって、かわりに2つのループになりました。

「白」のしきい値は「52」としました。実測した白のカウント値=62から10引いた値です。

「黒」のしきい値は「42」としました。実測した黒のカウント値=32に10足した値です。
前回のプログラムでは1つだけの「しきい値」で白/黒を判別していました。
それに対して今回は、黒検出用と白検出用で2つのしきい値を
用意しています。つまり「判定を厳しく」しています。
こうすることによって、動きに確実性が増すというメリットがありますが、反応は鈍くなるというデメリットがあります。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。