





前回までは、レゴマインドストームのプログラムを紹介するという「ソフトウェア入門」を続けてきましたが、今回からは趣向を変えて電気に関係する情報を紹介していきたいと思います。名付けて「エレキ入門」です。電気の知恵をロボット作りに生かしてみましょう。(松原拓也)
■超音波とは

「超音波センサ(Ultra Sonic sensor)」とは超音波を使って距離を測るセンサです。 NXTになってから初めて正式に採用された
センサです。
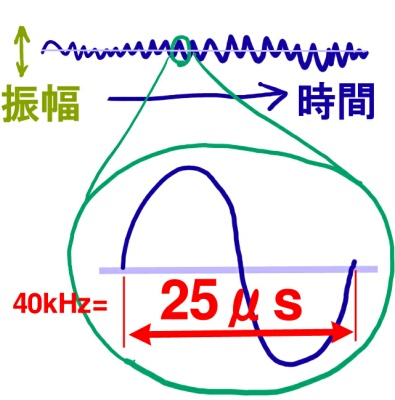
「超音波」というのは、周波数の高い音のことです。音というものは空気が振動して伝わります。この振動は波として表すことができます。 1秒あたりに発生する波の数を「周波数」と言います。周波数の単位の記号はHz(ヘルツ)です。そして、一般的に15kHz以上の周波数の音のことを超音波と呼びます。超音波は人間の耳で聞くことができません。 NXTの超音波センサでは40kHzの超音波が
使われています。つまり、1秒に40000回、空気を振動させています。

こちらが超音波センサの中身と同等の受信器です。超音波センサは送信と受信の2つで1セットになっています。
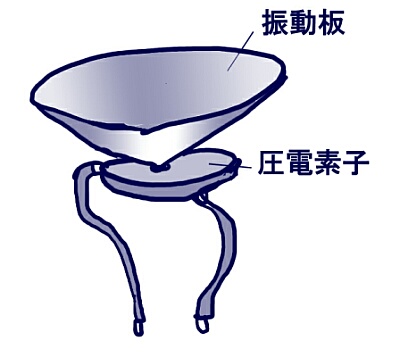
構造を図にすると、このような感じになります。受信側も送信側もほぼ同じ構造になっています。
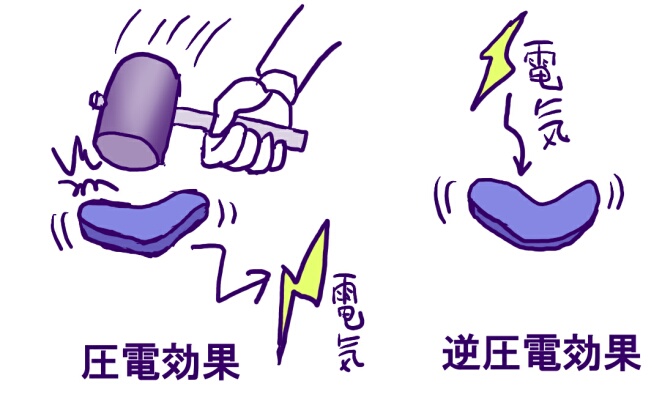
「圧電素子」には、面白い特性があります。
素子を変形させると電気を生み出します。これを「圧電効果」といいます。
逆に、電気を加えると素子が変形します。これを「逆圧電効果」といいます。
圧電効果の原理を活かすとセンサや発電機などを作ることができます。逆圧電効果の原理を活かすとスピーカ、アクチュエータなど作ることができます。
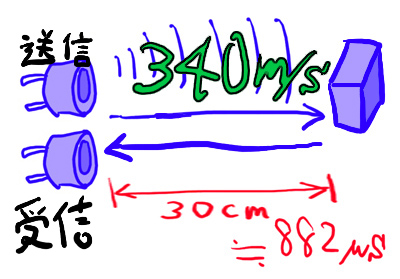
超音波センサの原理を図にしてみました。
まず、送信器は超音波を発生させます。超音波は障害物に当たって反射して、受信器に戻ります。音の伝わる速度は気温によって変化しますが、約340m/s(1秒間に340メートル進むという意味です)。たとえば、30cmの距離を音が伝わる時間は計算すると、
30×(1000000÷34000)=約882μsとなります。μs(マイクロセカンド)は1/1000000秒という単位です。超音波が往復するための時間、882×2=1.764ms。こうしたわずかな時間をマイコンで計測することによって、距離を求めています。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。