





◆サンプルロボットを作る(ソフト編)
「ボールをつかんでスタートエリアに戻るプログラム」を作ってみました。
[download]「ボールをつかんでスタートエリアに戻るプログラム」(NXTソフトウェア)
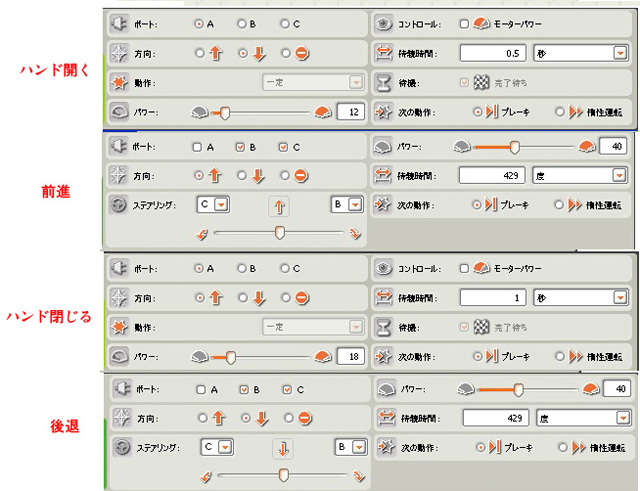
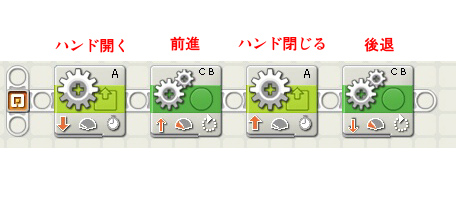
各アイコンの設定内容です。
「ハンドを開く」:ハンドが開き切るとモータが回りません。そこで制御方法を「角度」ではなく「秒(時間)」に設定します。
モータの負担を減らすため、パワーは低めの値にしておきます。
「前進」:モータBとモータCを同時に回します。回転の調子を合わせるために「移動」アイコンを使います。
正確な距離に移動させるため、モータBとモータCは「角度」で制御します。回転角度は移動距離をタイヤの直径で割って求めます。
「ハンドを閉じる」:モータAを回してハンドを閉じます。ハンドを開く時と同じく、「秒」でモータを動かします。
「後退」:前進と同じく、移動アイコンを使います。
実際にプログラムを動かしてみました。
[movie]動かしている様子のムービーです(youtube)。
ひとまず問題なくボールをつかむことができました。
以下は、気がついた点です。
・ロボットは蛇行せずにボールまでたどりつきました。ボールまでの黒いラインは無くてもよさそうです。
・ロボットがスタートしてからゴールまで、約5秒で終わってしまいました。これだと結果に差が出ません。ゴールまでの距離を伸ばしたほうがいいでしょうか。
・競技結果をどうやって集計するのか? という運営側の課題も残ってます。
これから案を練り直して、競技フィールドなどを発表し直します。そして、数ヶ月後には実際に競技を行ってみたいと思います。お楽しみに。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。