





◆ライントレースロボット(ジグザグ走行)
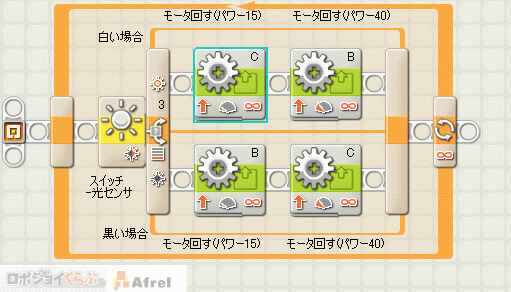
思いつくかぎり最もシンプルなライントレースロボットのプログラム(Program1)です。
スイッチブロックを使い、光センサの値に応じて分岐します。2つのモータを交互に回すことで、線の上を進んで行きます。
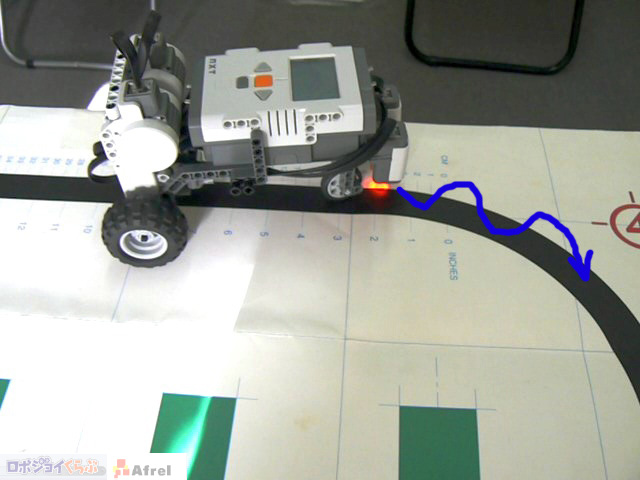
プログラムの実行結果です。ロボットが線の上をジグザグに進んでいきます。
ジグザグに進むので、あまり動きが効率的ではありません。遅くて競技とかでは使えません。
ハードウェアの面で見ると、この「はじめてロボ」はライントレースロボットには、あまり向いてません。 重心がタイヤからはなれていて、旋回しにくくなっています。これらの問題点をソフトウェアで解決してみたいと思います。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。