





ここでは、「教育版レゴ マインドストームEV3」と「TETRIXアフレルベースセット」を使ってロボットを作る方法について紹介していきます。
◆サーボモーターの接続
前回で各パーツの紹介が終わりましたので、今回から実際にモーター類を動かしてみたいと思います。
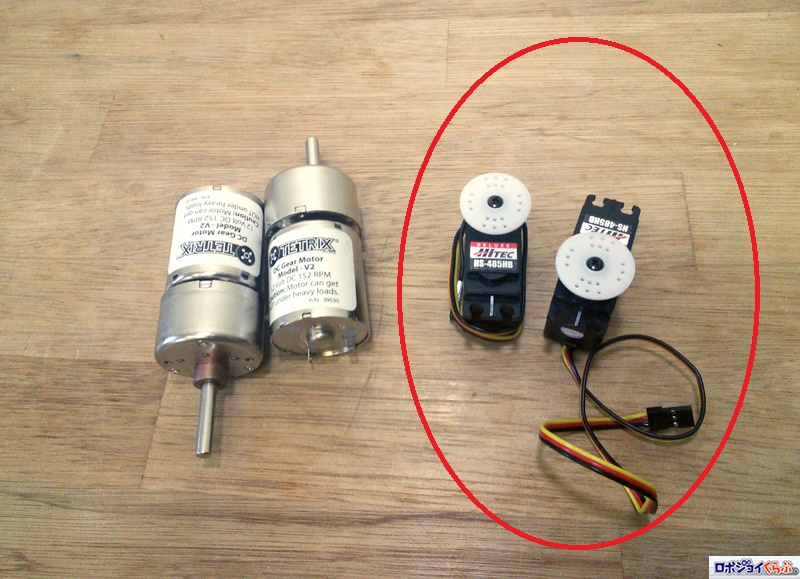
TETRIXで使えるモーターはDCモーターとサーボモーターの2種類がありますが、今回はサーボモーターだけ使ってみます。

サーボモーターを制御するには図のように接続します。必要な部品は次のとおりです。
・インテリジェントブロック(NXTもしくはEV3どちらでもOK。ここではEV3を使います)
・HiTechnic サーボモーター・コントローラー
・12V 充電式バッテリー(サーボモーターを動かすための電源です。満タンに充電しておきましょう)
・ON/OFFスイッチ(サーボモーター用の電源スイッチです)
・マウント・ブラケット(スイッチと合体させて使います)
・ケーブル
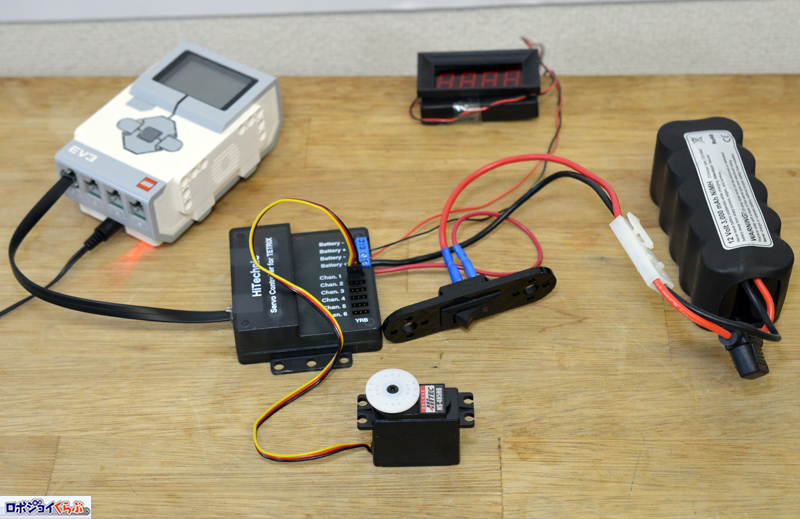
接続が完了すると、こうなります。すごくゴチャゴチャとしていますが、こうすることで大量のモーターをパワフルに動かすことができます。
この時点ではサーボモーターに電気を送る必要がないので、スイッチはOFFにしておきます。インテリジェントブロックもOFFのままで大丈夫です。
なお、写真の奥に写っている四角いのは電圧確認用の電圧計なので、気にしないでください。
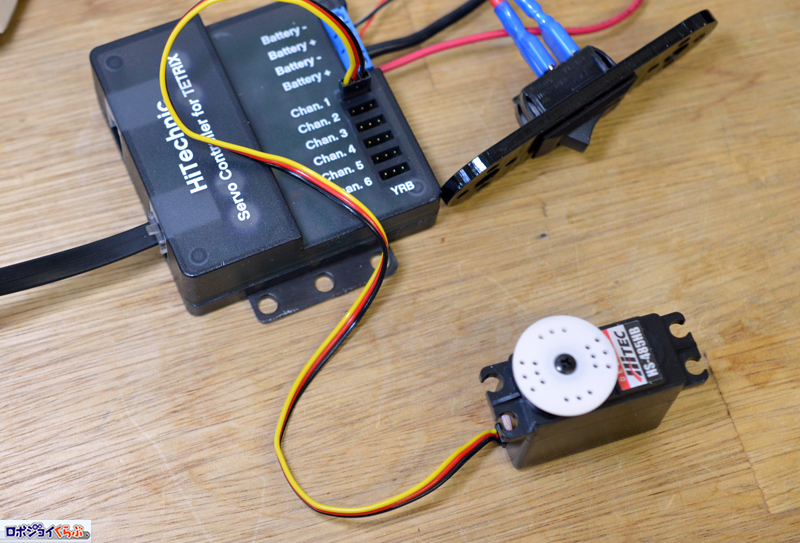
サーボモーターはHiTechnic サーボモーター・コントローラーの「Chan.1(チャンネル1)」のコネクタにつなぎます。最大で6台まで接続できます。「YRB」と書かれてますが、これは「黄」「赤」「黒」の順番になるようにサーボモーターのコネクタを取り付けるという意味です。180度間違えて挿し込まないようにしましょう。
コネクタ部分の「Battery+」にはバッテリーの赤いリード線(12V)をつなぎ、「Battery-」にはバッテリーの黒いリード線(GND)をつなぎます。端子のねじをマイナスドライバーでゆるめてから、リード線を挿し込んで、それからねじを締めると接続できます。 接続は絶対に間違えないようにしましょう。
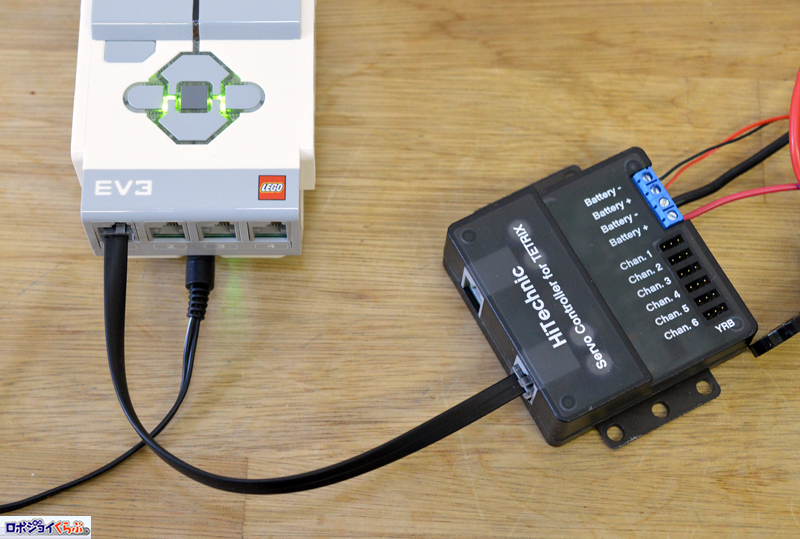
重要なことですが、サーボモーター・コントローラーはインテリジェントブロックの「出力」ではなくて、「入力」側のポートに接続します。ここではポート1に接続しました。入力側に搭載されている「I2C」という規格を使って、デジタル的に通信を行っています。 HiTechnic サーボモーター・コントローラーには2つのモジュラージャックが付いていますが、どちらにつないでもかまいません。内部的につながっていますので、ここからさらにDCモーター・コントローラーをつなぐことができます。 なお、HiTechnic サーボモーター・コントローラーはAutoIDには対応していないので、PortViewでは正しく表示されません。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。