





◆プログラムを実行
それではプログラムを実行してみましょう。
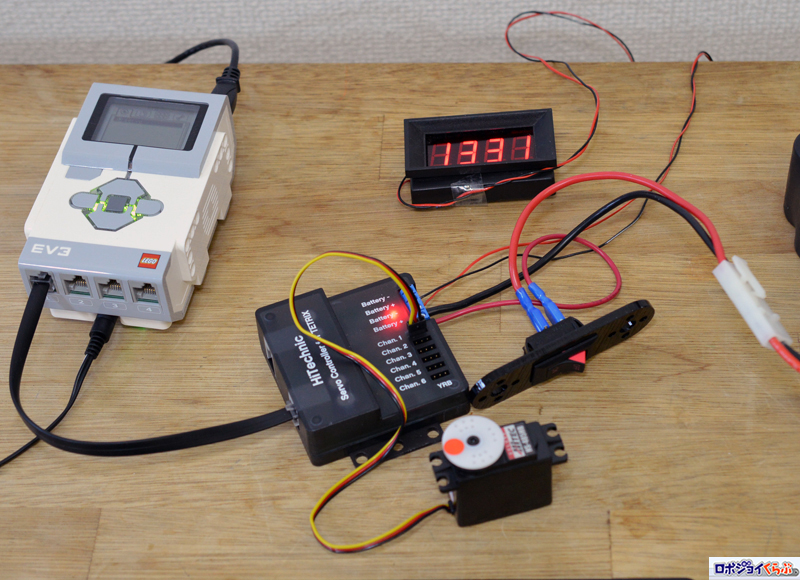
サーボモーター・コントローラー側の電源を入れた状態にして、 インテリジェントブロックとパソコンをUSBケーブルで接続。そして、プログラムを転送・実行します。
実行すると、サーボモーターが0度→90度→0度の順番に回転しました。
90度である状態を約5秒間に設定しました。
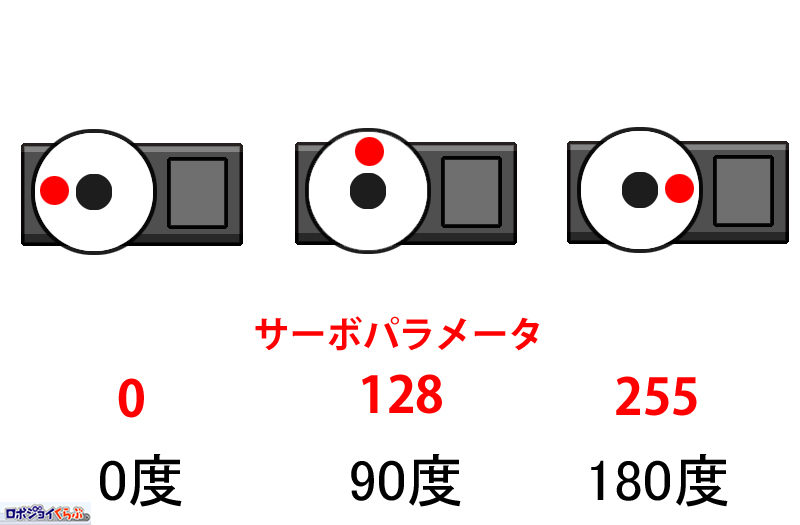
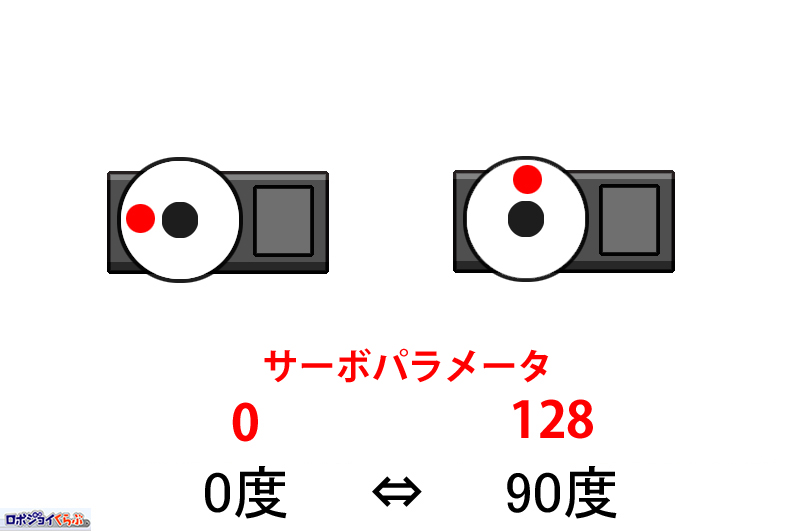
サーボパラメータとサーボモーターの角度との関係は図のとおりです。今回は128を設定することで、90度に回転させています。
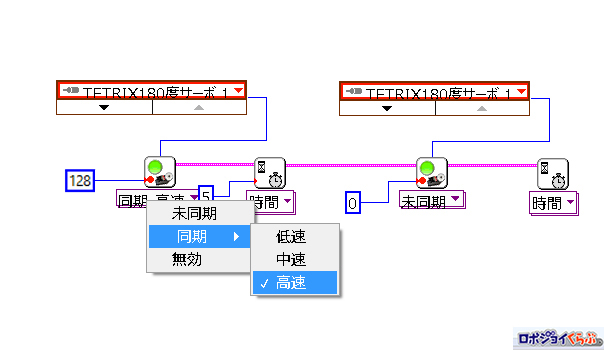
今回は使いませんでしたが、複数のサーボモーターを同じタイミングで動かすための「同期」という機能があります。これを使えば、サーボモーターの回転速度を3種類の中から設定することもできます。たとえば、「低速」を選択した場合だと回転がかなり遅くなるのですが、遅すぎて5秒以内に終端にたどり着けませんでした。この場合は待機時間を長くしてあげないといけないようです。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。