





◆DCモーターを動かすプログラムを作る
「LEGO MINDSTORMS用LabVIEW」を使ってプログラムを作ります。
メニュー画面から「プログラムを作成」を選択します。ロボットプロジェクト名は「dcmotor」としました。これによって、「dcmotor.lvrbt」というプロジェクトファイルが作られます。
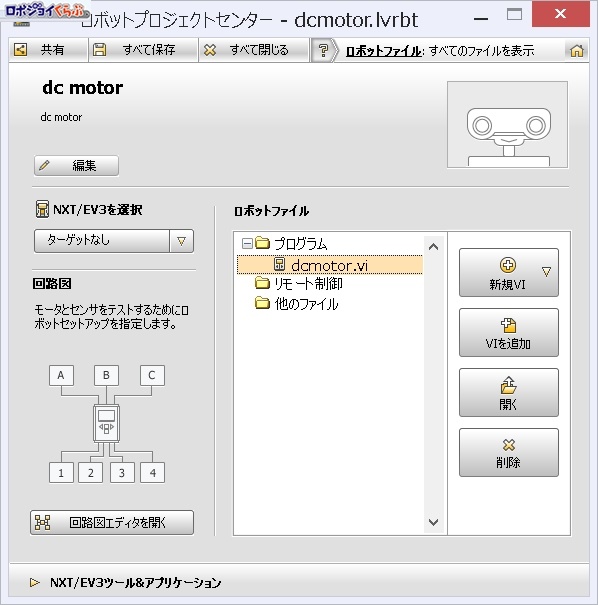
「ロボットプロジェクトセンター」という画面ではプログラム全体のプロジェクト(計画)について設定します。
(1)プロジェクトについての情報を入力します。
(2)「回路図エディタ」というツールを使って、ロボットのパーツ構成を登録します。
(3)プログラム(viファイル)を登録します。一番最初はファイルが存在しませんので、「新規VI」ボタンを押してファイルを作ります。ファイル名は「dcmotor.vi」にしました。ちなみに「VI」というのは「Virtual Instruments(仮想計測器)」の略です。
なお、「NXT/EV3を選択」という項目では、パソコンに接続しているインテリジェントブロックを登録します。先に設定することも可能です。ここでインテリジェントブロックに電源を入れるとバッテリーが無駄に減りそうなので、実行する直前まで「ターゲットなし」で進めても問題ありません。
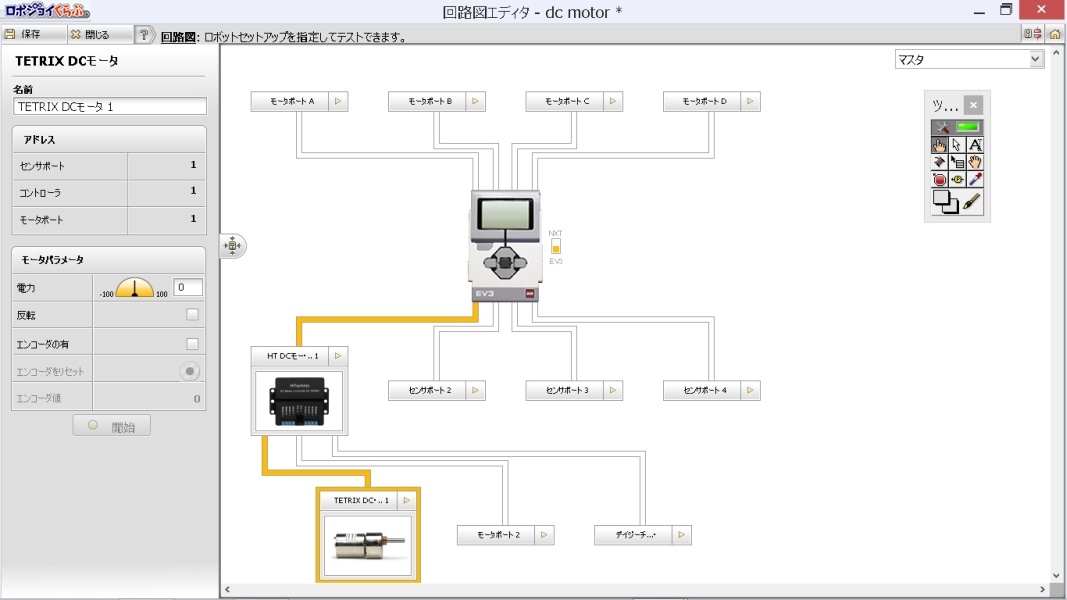
「回路図エディタ」の画面です。インテリジェントブロックに接続しているパーツを登録します。
ここでは、入力ポート1にDCモーター・コントローラーを登録して、サーボポート1(チャンネル1)に「TETRIX DCモータ」を登録しました。
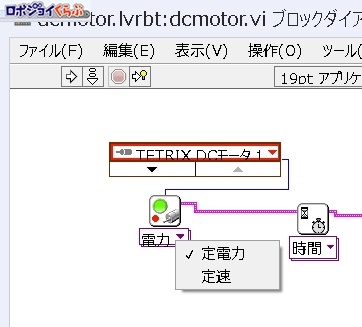
DCモーターを動かすだけのシンプルなプログラムを作ります。 作り方は、「ブロックダイアグラム」にアイコンを並べて、線でつなぐだけです。このへんの使い勝手はROBOLABと同じです。
DCモーターを制御するには「モータを回転」というアイコンを使います。 電力/速度の設定は「定電力」にしました。エンコーダーが元から付いていないので、この方法しかありません。 モーターのパワーは初期値の「75」が適用されてしまいます。
「時間を待機」アイコンで1秒間だけ待つようにしてみました。
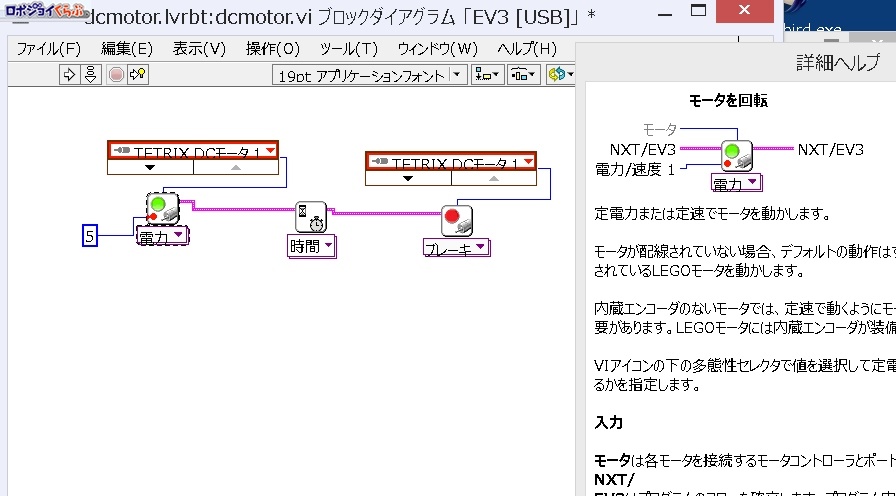
完成したプログラムがこちらです。「モータを回転」「時間を待機」「モータを停止」の順番にアイコンをつなぎました。モーターのパワーは「5」に設定しました。回転する速度が予想できませんので、安全を考えてできるだけ小さい値を入れましょう。
アイコンの機能を調べるにはヘルプを活用しましょう。操作方法は、知りたいアイコンにカーソルを合わせて右クリック、「ヘルプ」を選択するだけです。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。