





◆レンジャーボットの組み立て1
組み立て開始です。
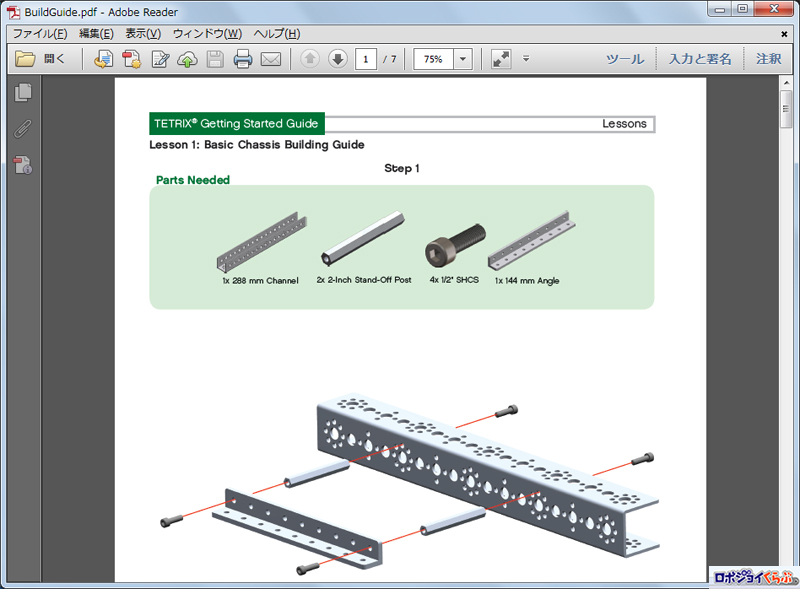
説明書の「レッスン(Lessons)」の項目の「レッスン1(Lesson1)」の「BuildGuide.pdf」を読みながら組み立ていきます。
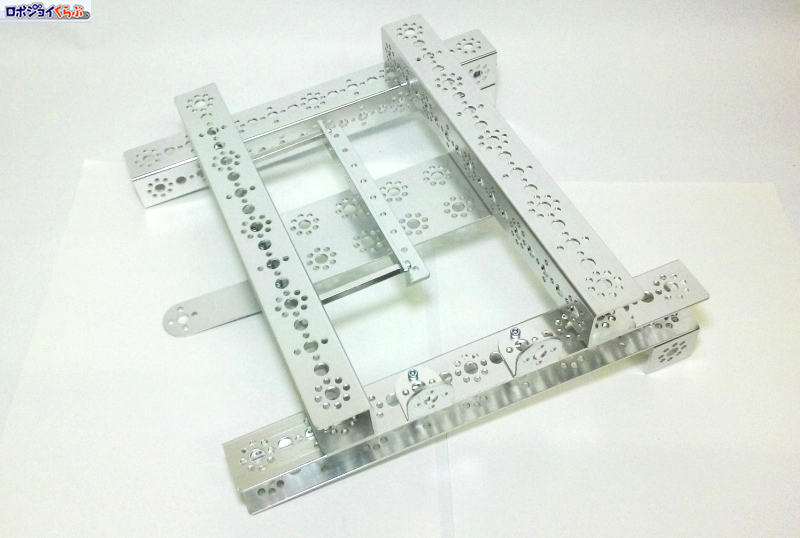
レッスン1が完了した状態がこちらです。
六角レンチは一番太い7/64インチを一番多く使いました。毎回、六角レンチを使うのが面倒なので、ねじはある程度は指で回して、最後に六角レンチで止めるようにしました。
この写真のように、四角く組む場合には、最初にねじをきつく締めてしまうと、うまく部品が入らない可能性があります。わざとねじをゆるくしておいて、最後にきつく締めるといいみたいです。
続いて、「レッスン2(Lesson2)」の「BuildGuide.pdf」を読みながら組み立ていきます。
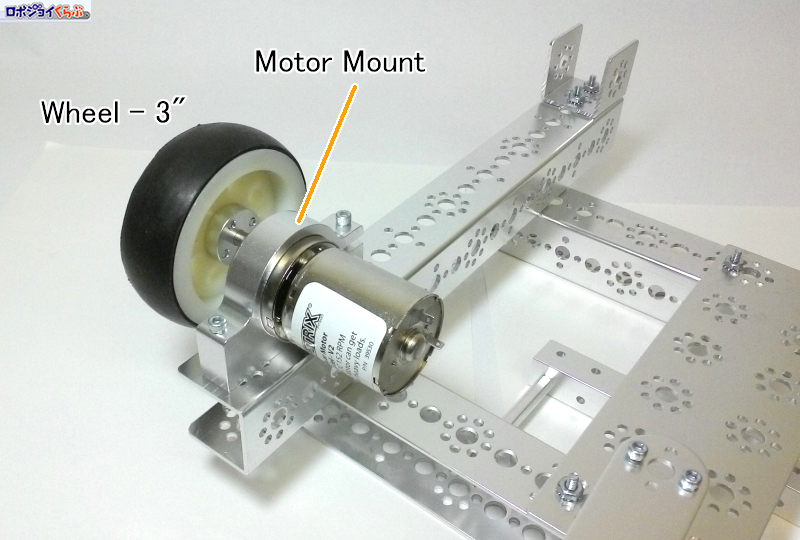
個人的に一番大変だったのがこの部分です。
「モーターマウント(Motor Mount)」という部品を使って、 DCモーターを取り付けます。 モーターマウントの穴は狭くて、バネ状になっています。最初、まったくモーターが入らないので悩みましたが、結局、力いっぱい押し込むと入りました。
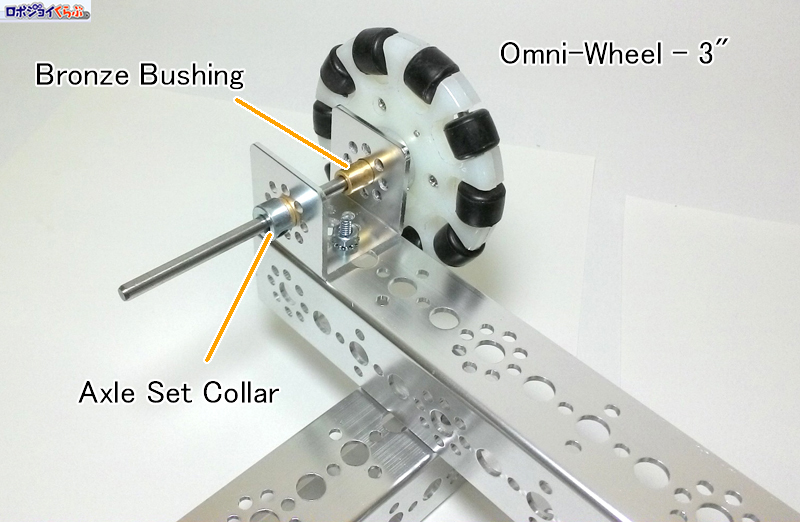
「オムニホイール」を取り付けている様子がこちらです。 なぜオムニホイールを使っているかというと、ロボットを旋回させる時にタイヤを引きずらないようにするためです。
たとえば、この「ブロンズ・ブッシュ(Bronze Bushing)」はシャフトと穴のすき間を埋めながら、回転を滑らせるために使う部品です。シャフトは抜けないように「シャフト止め(Axle Set Collar)」で固定します。
部品の扱い方が、レゴマインドストームとは何から何まで違います。
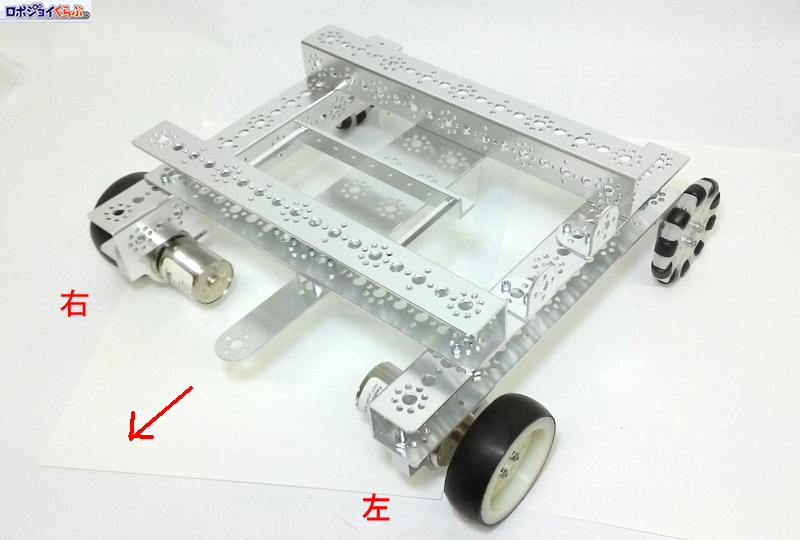
タイヤとオムニホイールをつけ終わった様子がこちらです。
矢印の方向がロボットにとっての前になります。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。

