





◆超音波センサーの読み取り
ロボットに取り付けたセンサーのうちの一つ、超音波センサーを使う方法を紹介します。
超音波センサーを読み取るには「超音波センサを読み取り(センチ)」というアイコンを使います。英語版の名前は「Read Ultrasonic(cm)」です。このアイコンは同じ名前でNXT用とEV3用の2種類ありますので、間違えないようにしましょう(間違えると測定できません)。
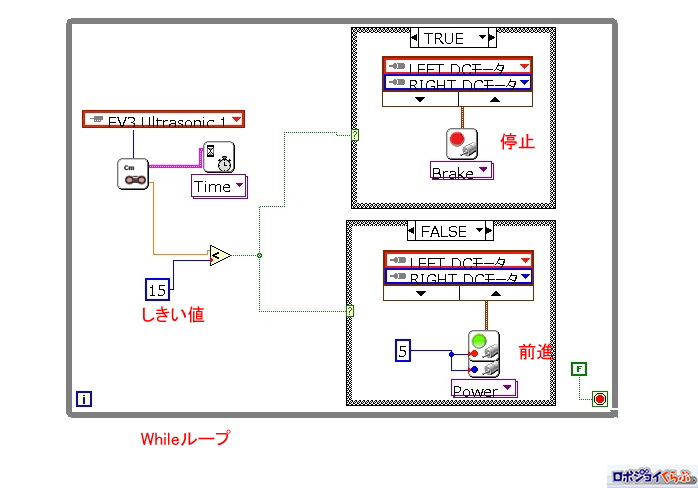
一番外側の四角いワクは「Whileループ」といって、条件にしたがって、囲みの中の処理を繰り返します。
内側の2つの四角いワクは「ケースストラクチャ」といいます。条件が正しい場合には「TRUE」、条件が違う場合には「FALSE」と書かれた囲みの中を実行します。
この場合、超音波センサーで測定した値が15cm以上の場合には、 モーターがプラスに回転して、15cm未満の場合にはモーターが停止します。
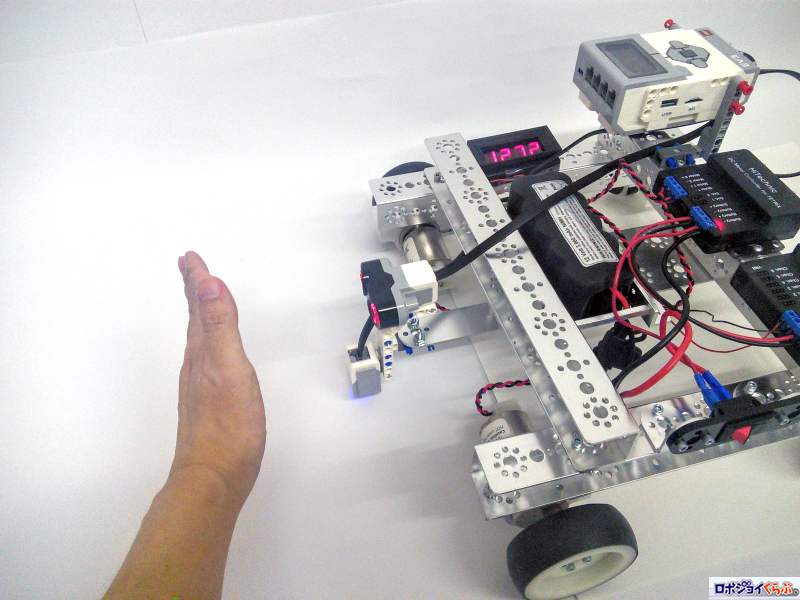
プログラムを実行してみましょう。
実行すると、ロボットが前進しました。超音波センサーに手をかざすと、ロボットが停止しました。見事に成功です。 ちょっと、停止するまでの反応が遅い気がしますが、気になる場合には「時間を待機(Wait for Times)」の時間を短く変更しましょう。ここでループ1周あたりの時間を調節しています(デフォルトは1秒です)。
今回、未使用だった「EV3カラーセンサー」は次回に使ってみたいと思います。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。