





ここでは、「教育版レゴ マインドストームEV3」と「TETRIXアフレルベースセット」を使ってロボットを作る方法について紹介していきます。
◆センサーの取り付け
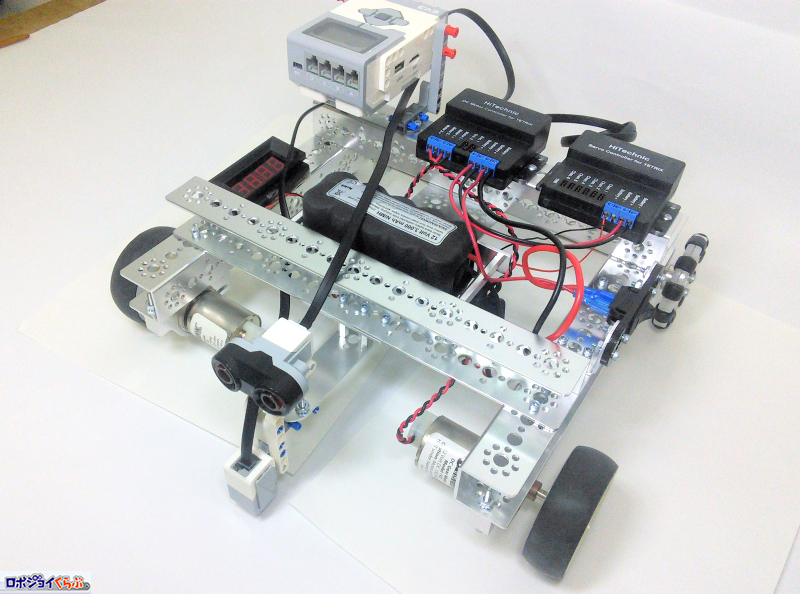
前回からの続きですが、レッスン3で組み立てた「レンジャーボット(Ranger Bot)」のプログラムの動かし方を紹介します。前回、使わずに終わってしまったEV3カラーセンサーを今回は使ってみたいと思います。
EV3カラーセンサーには3つのモードがありますが、今回はライントレースを行ってみたいので、反射光モードに設定します。色ではなく、反射してきた光の大きさを検出します。
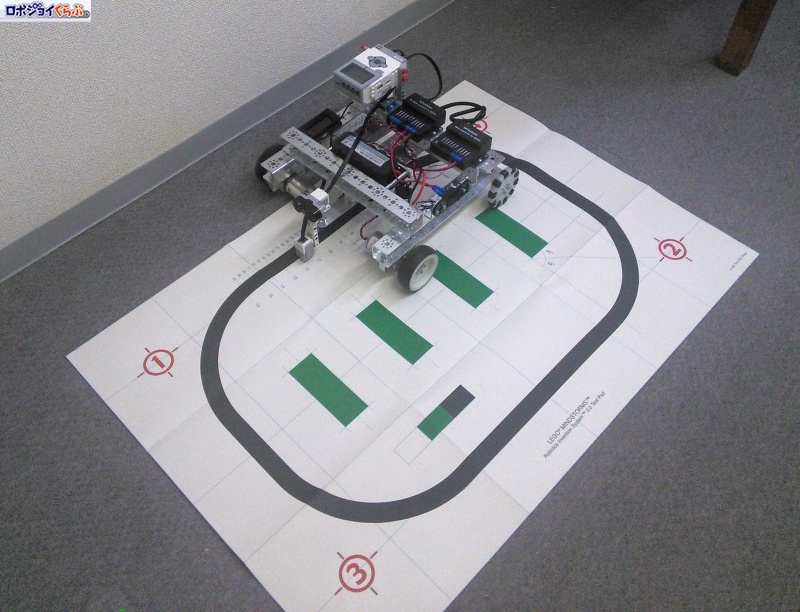
ロボットを走らせるため、写真のようにオーバルコースのシートを用意してみました。いつもはシートをテーブルの上に敷いていますが、今回はロボットが大きいので床に敷いています。かなり広いスペースが必要となります。

反射光モードでのセンサーの特性を「Port View」で確認してみました。 白い床面では値は70くらい。黒い床面では7くらいでした。だいたい30くらいが、白と黒の中間の値ということになります。この値はセンサーと床面の距離など、さまざまな条件によって変化するので、実際に自分で確認してみましょう。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。