





◆動作テスト用のプログラム1
プログラムを作ります。
CD-ROMに収録されているプログラムはNXT用で作られていますので、EV3用で動かそうとすると修正に手間がかかってしまいます。そのため、オリジナルでプログラムを作ったほうが良さそうです。
なお、TETRIXは金属を使っていますので、重くて頑丈です。モータも強力なものが使われています。一種の判断ミスが事故につながる場合がありますので、常に緊張感を持って望みましょう。
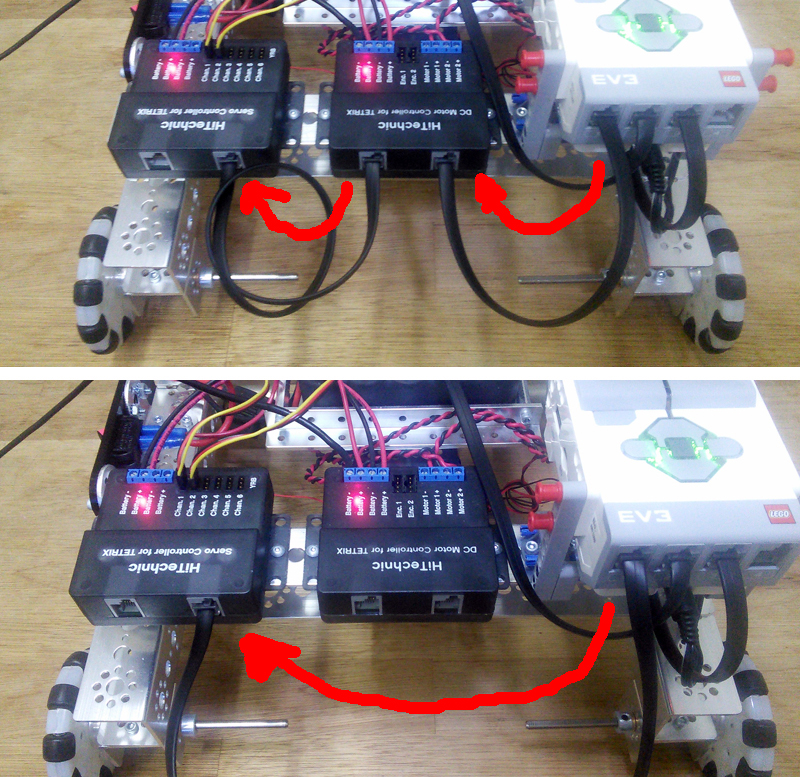
本来はデイジーチェーンで接続すべきなのですが、今回はDCモータ・コントローラを使わないので、サーボモータ・コントローラとインテリジェントブロックを直結しました。
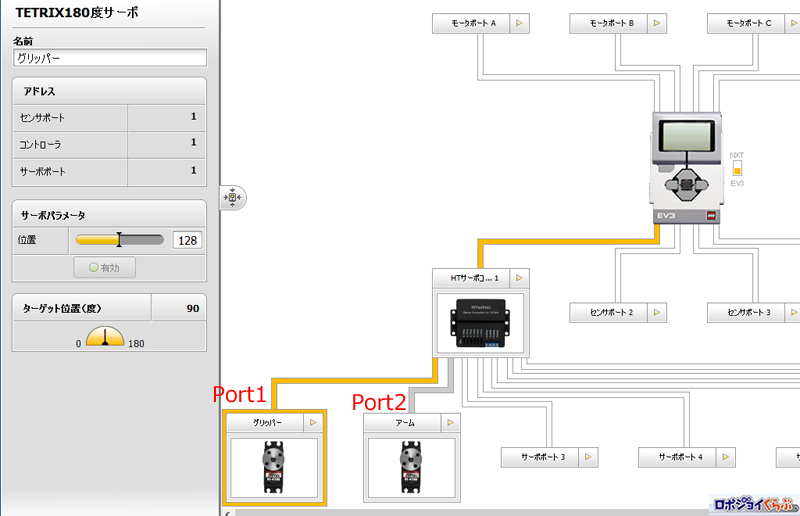
回路図エディタを使って設定します。
サーボモータ・コントローラのポート1をグリッパーにつなぎ、ポート2をアームにつないでいます。

サーボパラメータとサーボの角度の関係はこのようになります。覚えておきましょう。
・0度に回転軸を動かしたい場合には0を設定します。
・90度に回転軸を動かしたい場合には128を設定します。
・180度に回転軸を動かしたい場合には255を設定します。
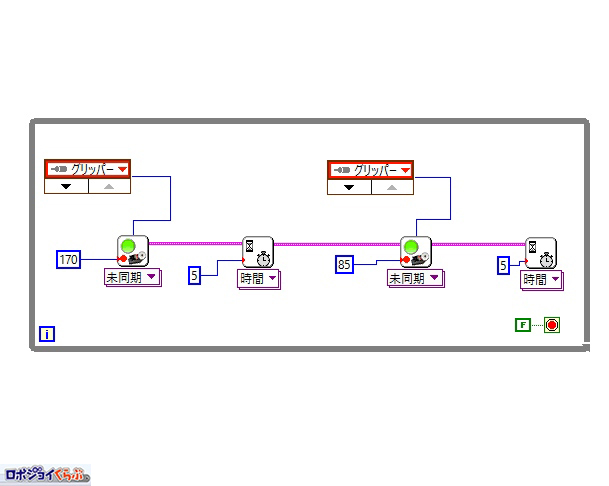
最初に作ったプログラムがこちらです。5秒おきにグリッパーが開閉します。
プログラムを実行するさいには、DCモータとサーボモータ用の電源(DC12V)をいつでも切れる状態にしましょう。最初のころは、誤動作に備えて電源スイッチに指を当てておくといいでしょう。「危ない」と思ったら、すぐに電源を切ってモータを脱力させるというクセをつけておきましょう。
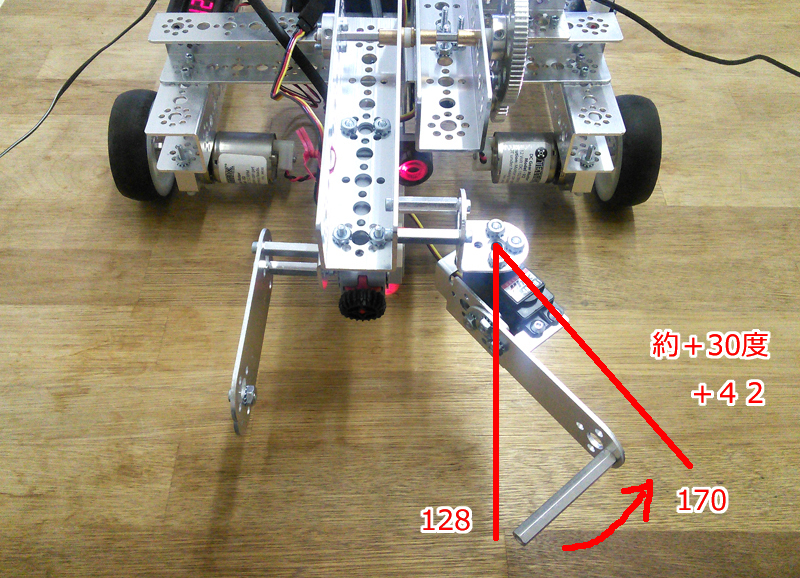
実行後の様子です。グリッパーが開いた状態です。90度+30度=120度(パラメータとしては170)の位置です。

グリッパーが閉じた状態です。90度-30度=60度(パラメータとしては85)の位置です。
注意点ですが、グリッパーの先端は衝突させずに、必ずすき間を少し空けておくようにしましょう。サーボモータには絶対にムリな回転をさせてはいけません。サーボモータにムリな動きをさせるとギヤが破損したり、回路が壊れたり、バッテリの消費が激しくなります。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。