





ここでは、「教育版レゴ マインドストームEV3」と「TETRIXアフレルベースセット」を使ってロボットを作る方法について紹介していきます。 今回から応用編となります。
◆配線を完成させる
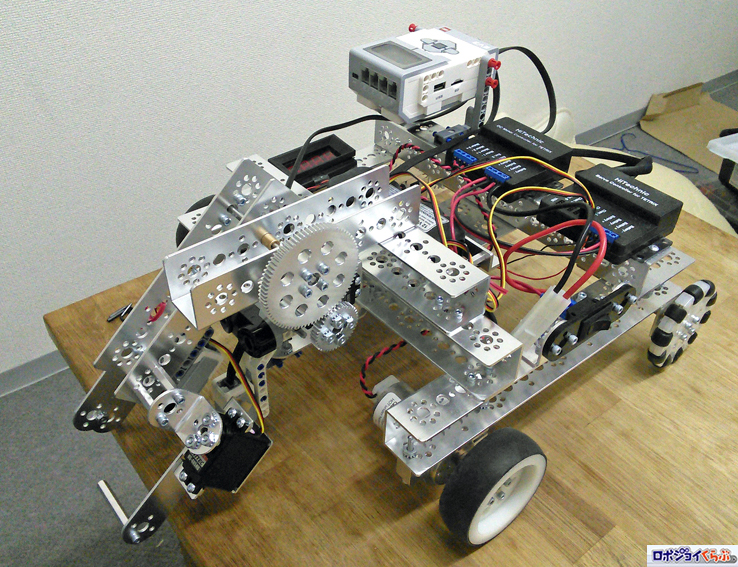
前回はレンジャーボットに「アーム&グリッパー(Arm and Gripper)」を搭載させることに成功しました。 グリッパーがつかむための機構で、アームが持ち上げるための機構です。
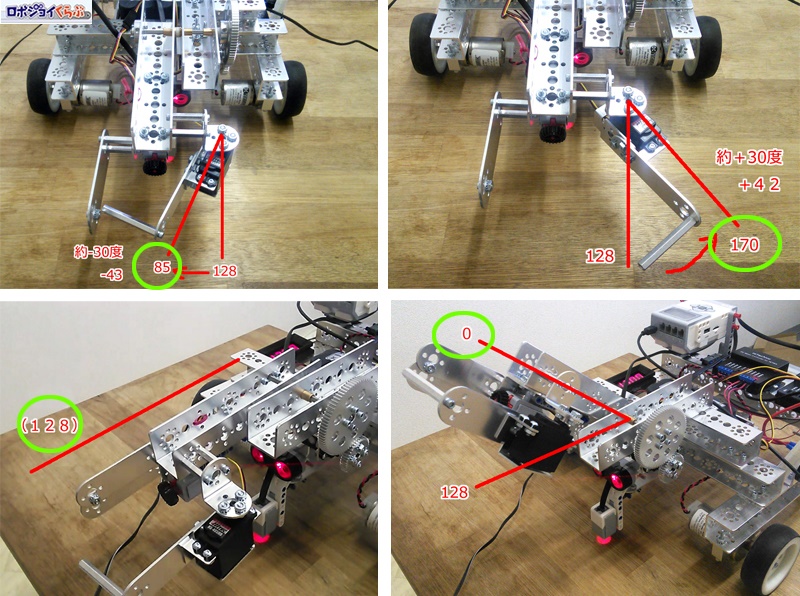
前回のおさらいです。前回はグリッパー用のサーボモーターとアーム用のサーボモーターをそれぞれ動かしました。可動範囲をフルで動かすと衝突してしまいますので、安全な角度を割り出しました。
前回は最低限の動作確認だけで終わってしまいましたが、 今回は実際にアーム&グリッパーを使って物を動かしてみたいと思います。
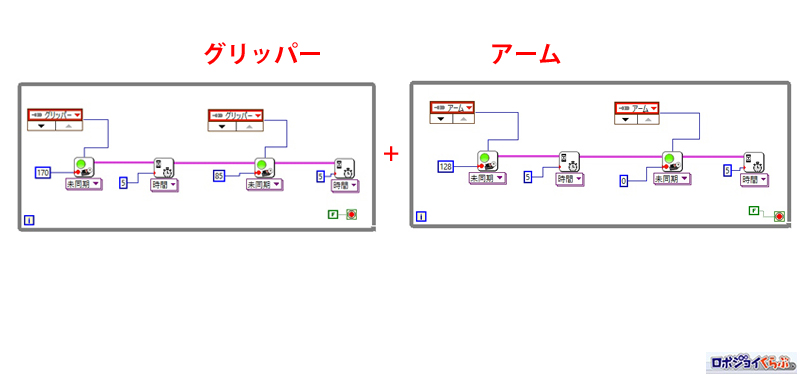
前回、動作確認として作ったグリッパー用プログラムとアーム用のプログラムを活用します。この2つのプログラムを合体させると完成すると思うのですが、その前に部品の配線を済ませないといけません。
ロボットの配線を中途半端な状態で進めてしまいましたので、完全な状態にします。
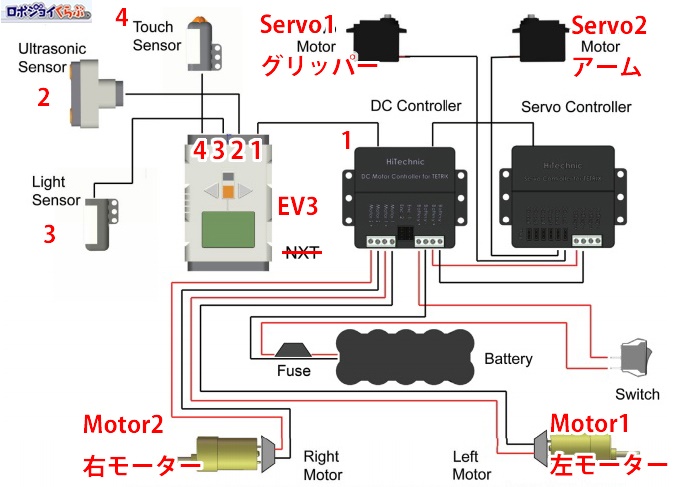
参考になるのが、TETRIXのキットのCD-ROMに収録されているオンラインマニュアル(PDF)です。 ちょっと配線のつながりが分かりにくいので、情報を書き加えてみました。
この図のように配線します。

配線中の様子です。
コントローラはこのようにデイジーチェーンでつなぎます。
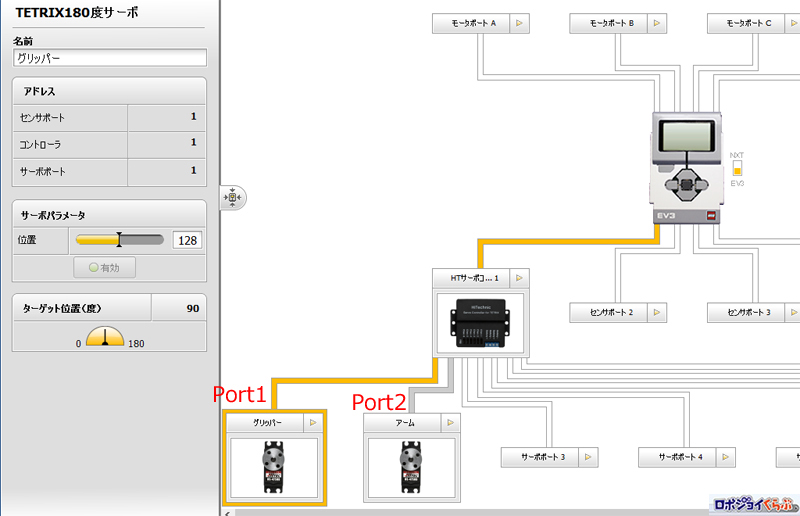
続いて、回路図を修正します。
前回の回路図は最小限の部品しか登録していませんでしたので、今回は完全な状態にします。
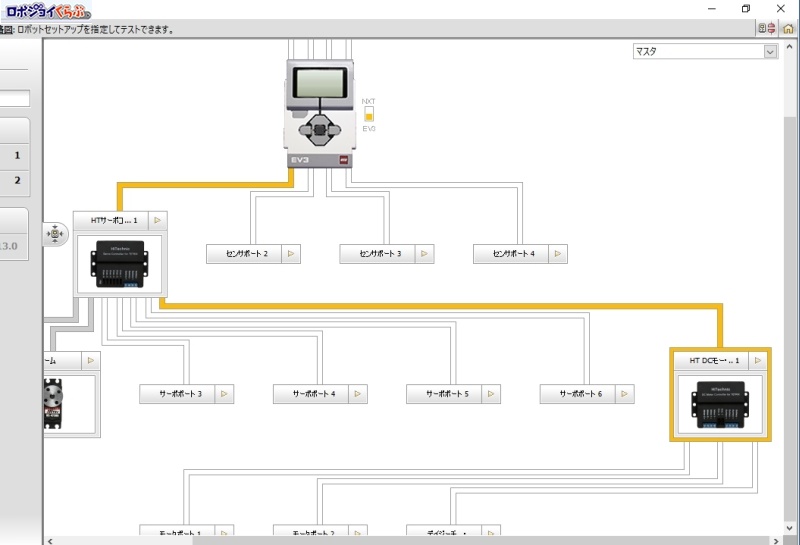
デイジーチェーンでコントローラを増設します。 写真の状態だと間延びして見ずらいので、接続する順番を逆にします。
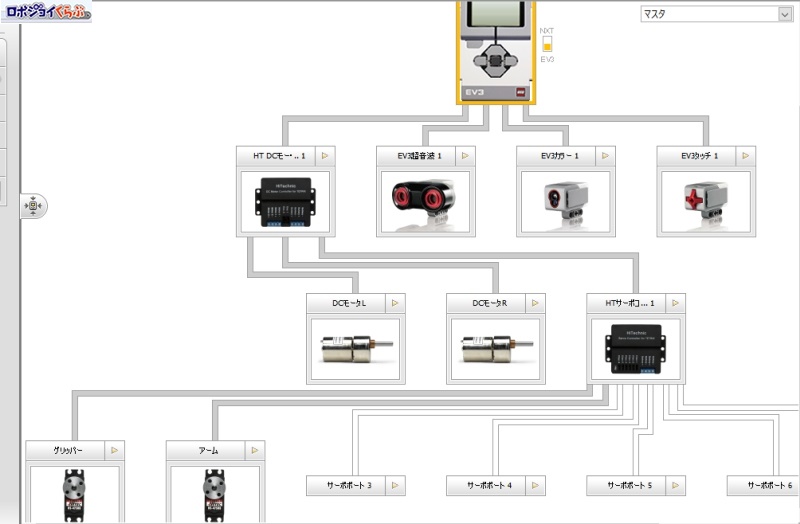
回路図エディタの設定が完了しました。
思ったよりも手間がかかりました。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。