





◆超音波センサーに反応させる
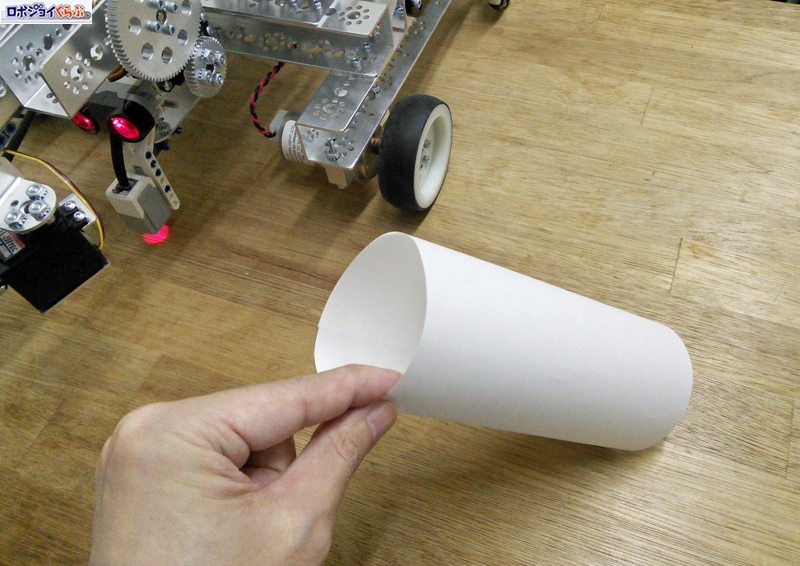
実際にグリッパーにキャッチさせる物を用意します。 グリッパーのサーボにはムリな回転をさせると 消費電流が増えたり、ギヤが破損してしまいますので、 できるだけ柔らかい物にしないといけません。そこで紙の筒にしてみました。B5の紙を丸めてテープで止めただけです。
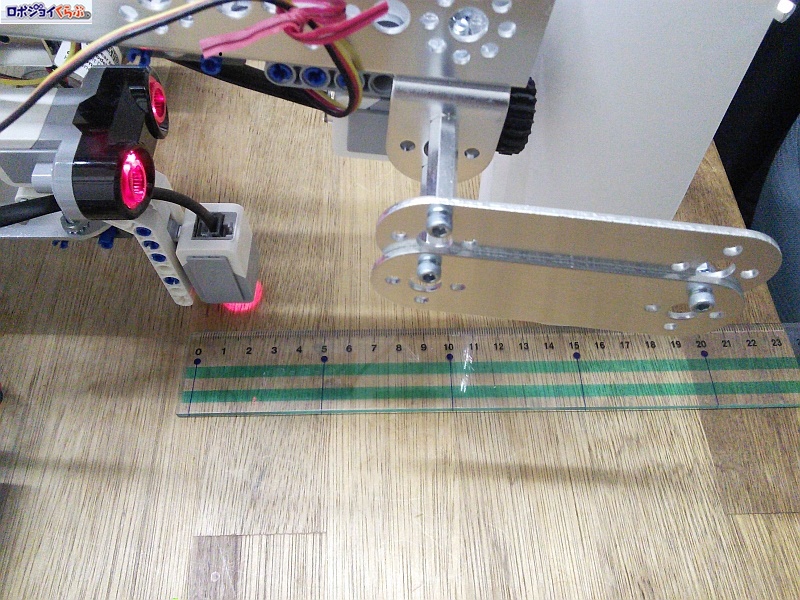
超音波センサーと紙筒の距離をあらかじめ測っておきます。 だいたい最短で12センチですね。
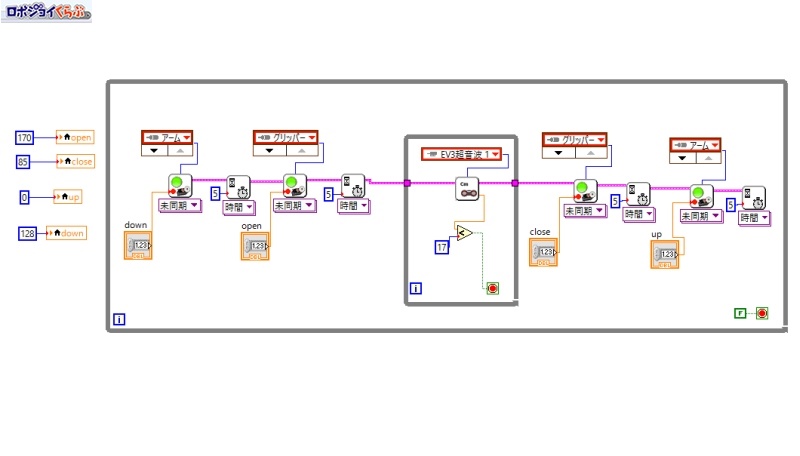
先ほどのプログラムに超音波センサーの待つ処理を入れてみました。 中心にWHILEループを追加しています。 比較する距離は17センチにしてみました。 15センチくらいでもいいのですが、 反応がにぶい場合を想定して長めに設定しています。
プログラムの実行中です。
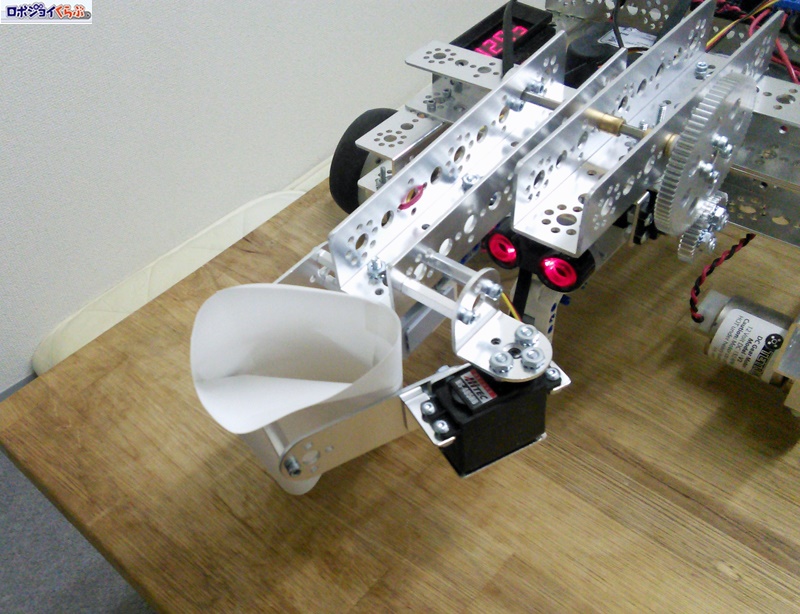
失敗です。ツメで挟んでしまいました。
しきい値が長めだったり、センサーの反応が早すぎると、こうなってしまいます。
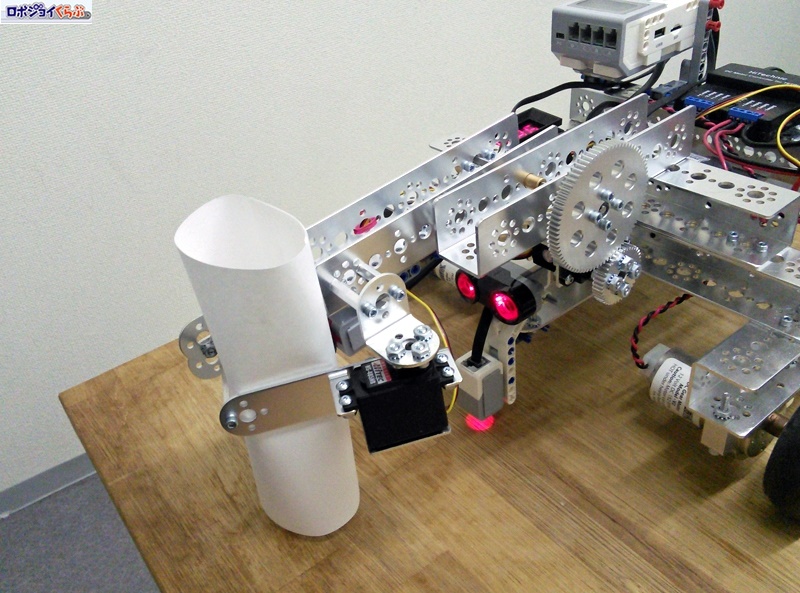
素早くグリッパーに差し入れることで、つかませました。
それよりもセンサーが反応してからサーボモーターが動くまでのタイミングを遅らせたほうが良さそうです。
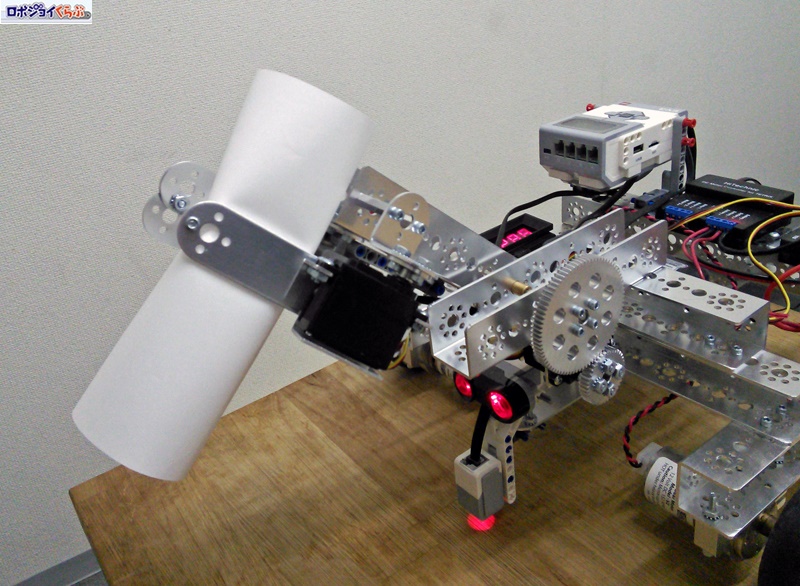
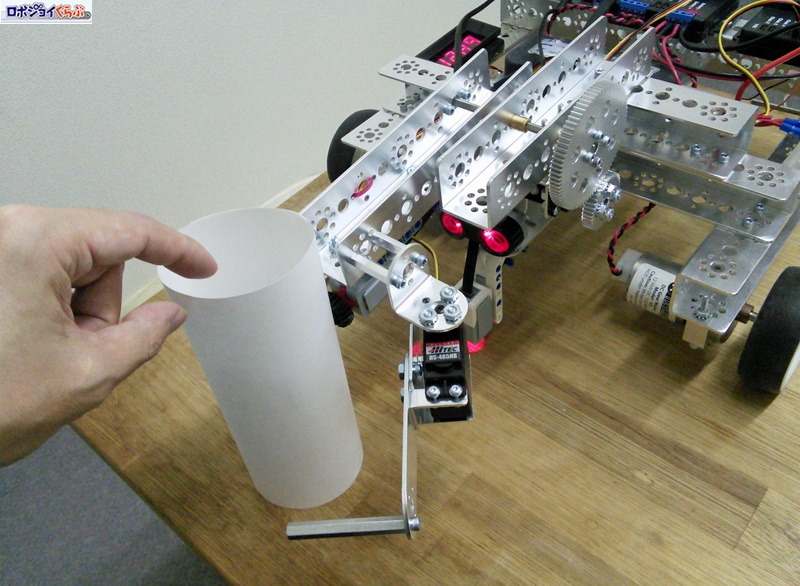
アームで動いて、紙筒を持ち上げることができました。実にロボットらしい動きです。
持ち上げたあとは紙筒を元の高さに戻して、グリッパーを開きます。この後、超音波センサーがまた反応してしまいますので、紙筒を手でどかしました。
次回はいよいよDCモーターを制御して、移動しながら物がつかめるようにしてみたいです。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。