





◆船ロボットのプログラム-全体
競技の流れとあわせて、船ロボットのプログラムを順に説明します。
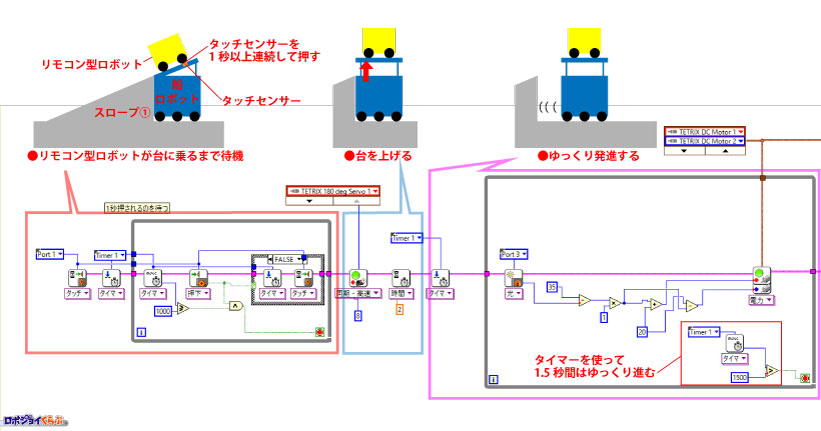
リモコン型ロボットがスロープ①を登って船ロボットに乗り、タッチセンサーを押すまで待機します。
確実に乗ったことを判定するため、タッチセンサーが1秒以上押され続けるまで待機します。
次に、サーボモーターのスイッチを動かし、台を持ち上げます。
台は、上下の動きを止めるリミットスイッチに触れると停止します。
台が上がりきるまでの時間を考慮して、サーボモーターを動かしてから2秒待機します。
続いて走行を開始します。
最初はゆっくり動き出します。
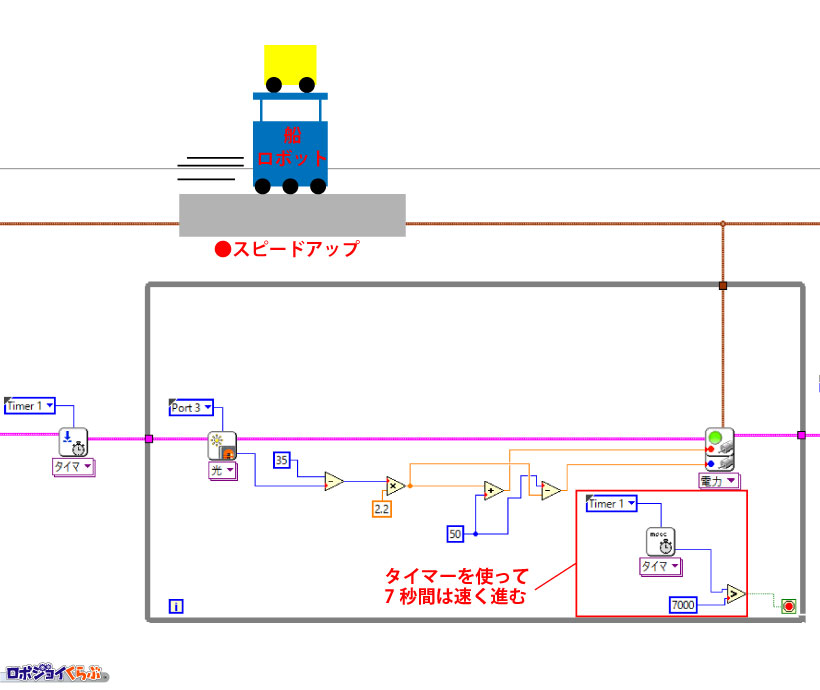
その後スピードを上げます。
スロープ②に到達する前に減速するため、タイマーを使って7秒間速く進みます。
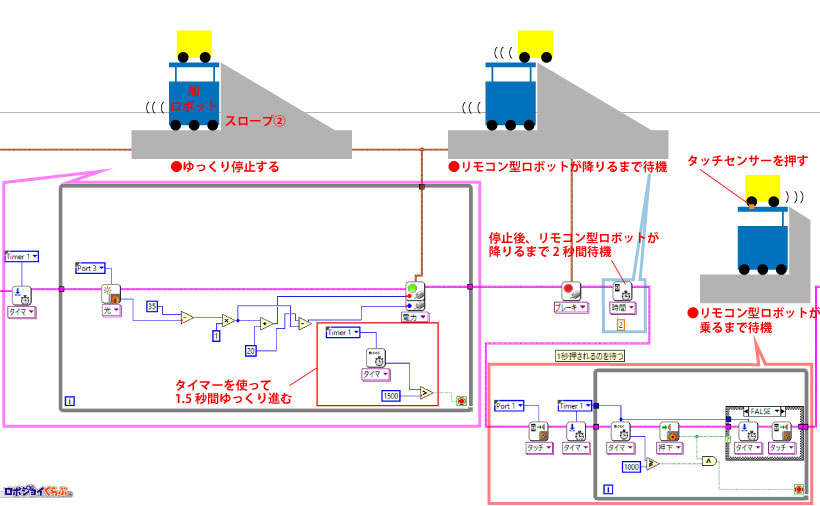
減速してスロープ②に到着します。
リモコン型ロボットが完全に降りきるまで、2秒待機後、再び真珠をとって戻ってきたリモコン型ロボットが、台の上に乗るまで待機します。
最初と同じように、確実に乗ったことを判定するため、タッチセンサーが1秒以上押され続けるまで待機します。
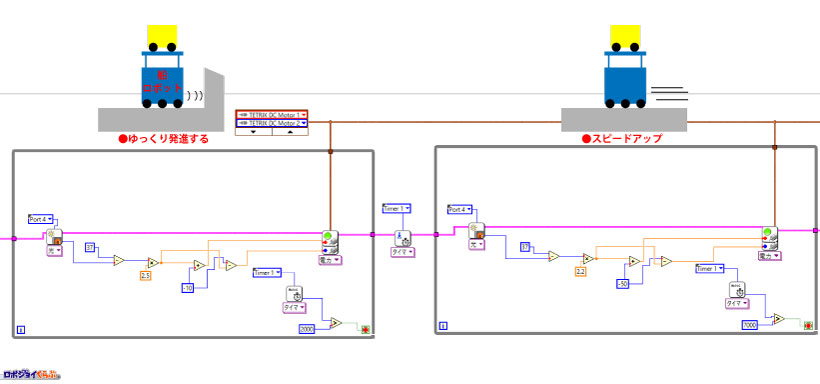
来た時と同じように、ゆっくり発進し、途中はスピードを上げます。
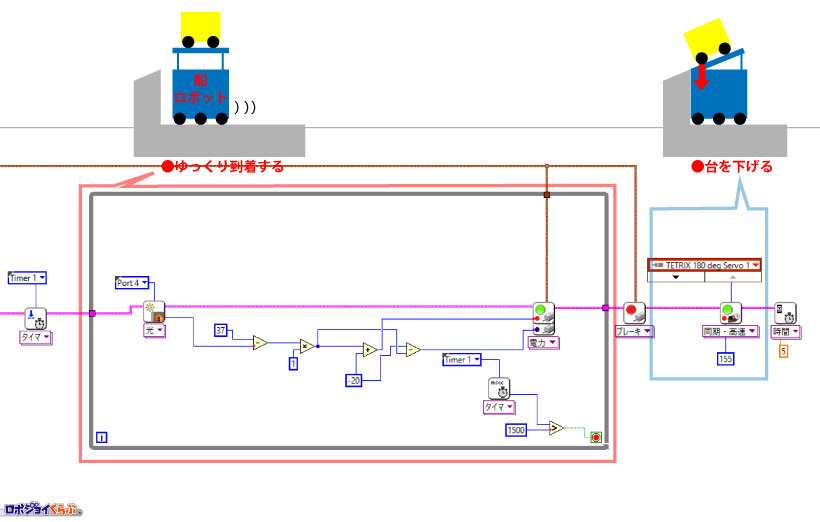
スロープ①に到着するときは減速し、サーボモーターのスイッチを動かして台を下げます。
台は、上下の動きを止めるリミットスイッチに触れると停止します。
このあと、リモコン型ロボットがスロープ①をおりて真珠を飾ってゴールです。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。