





◆実験用ロボットとフィールド

実験用にシンプルなロボットを作ってみました。
使用しているモーターは「Lモーター」1つだけです。 モーターは出力ポートAにつないでいます。 モーターを正転させると前進します。
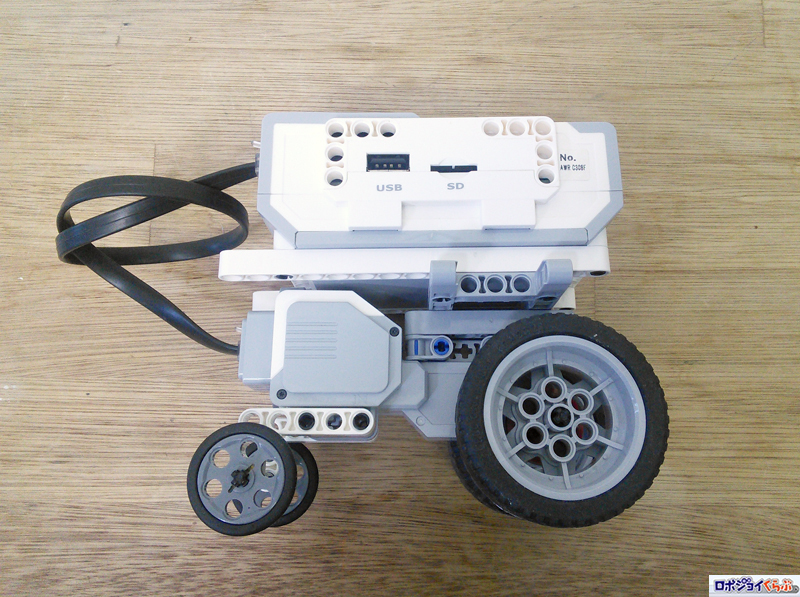
ロボットを側面から見た様子です。写真の右側が進行方向です。大きいほうのタイヤはモーターにつながっています。タイヤの直径は56mmです。
小さいほうのタイヤは空回りします。
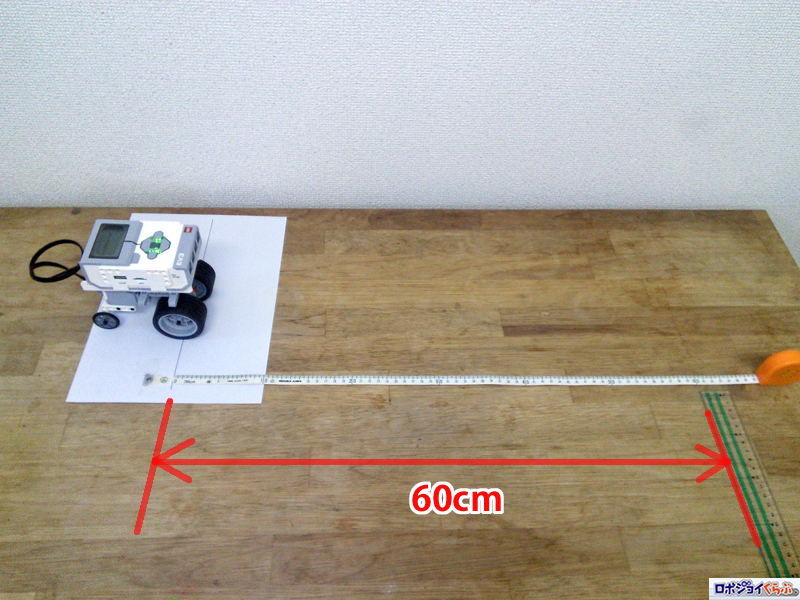
テーブルにロボットを置きます。 巻き尺で距離を測って、スタート地点から60cm先をゴール地点とします。
今回、特に提案したいのは、走行タイムやモーターの角速度を見える状態にすることです。思い込みではなくデータで問題点を洗い出し、対策することがロボット競技では重要だと思います。速くて正確なロボットを作りましょう。
たとえば、走行タイムは人間がストップウォッチで測ったりせずにロボットそのもので測ってみたらいいのではないでしょうか。手間は減って、測定ミスもなくなると思います。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。