





【問題1の答え】
では、問題1の答えを見てみましょう。
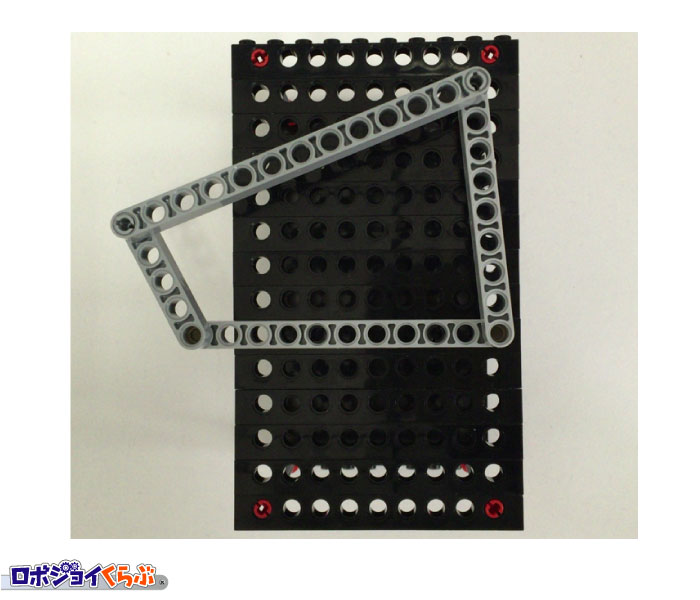
正解の1つとして、左図のようなビームの組み合わせが考えられます。
この問題のポイントは、最短リンクの隣のリンクを固定することです。
てこ・クランク機構を構成するためには、最短リンクの隣のリンクを固定しなければなりません
次にグラスホフ機構が成り立っているか確認してみましょう。
5・9・11・13ビームの長さを、それぞれ5、9、11、13とします。
グラスホフ機構は、
(最短リンク) + (他の1つのリンク) ≤ (残り2つのリンクの和)
が成り立つので、最短リンクの長さを5として考えると、
(1) 5+9=14 ≤ 11+13=24
(2) 5+11=16 ≤ 9+13=22
(3) 5+13=18 ≤ 9+11=20
となります。
このことから、グラスホフの定理を満たしていて、てこ・クランク機構が成り立つことが分かります。
クランクを動かした様子はこちら
この動画は、クランクを時計回りに回転させています。
てこが、揺動運動をしていることを確認してみよう。
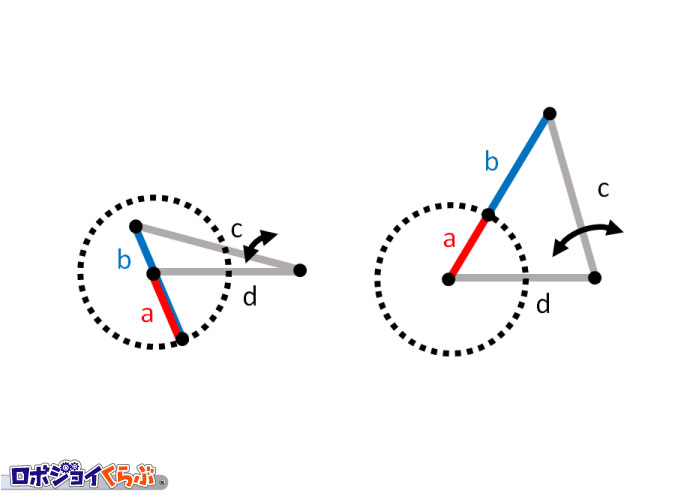
なお、てこを原動節として力を加えてみると、クランクが上手く回らなくなるときが出てくると思います。
そのような機構の状態を死点と呼びます。
左図のようにリンクc(てこ)を原動節として動力を与えたとき、リンクaとbが一直線に並んだ場合には、従動節a(クランク)に上手く動力を伝えることができません。
【問題2】
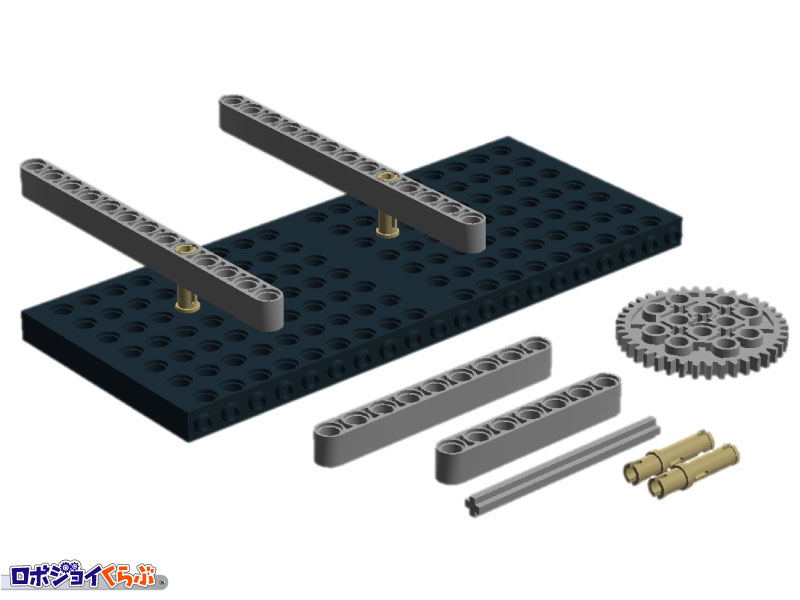
左のパーツを使い「てこ・クランク機構」を作り、設置されているビームを揺動運動させるためにはどうすればよいでしょうか?
※ビームの長さは、7・9・13を使用します。
この問題の土台は、下のパーツを使いブリックを横につなげてください。

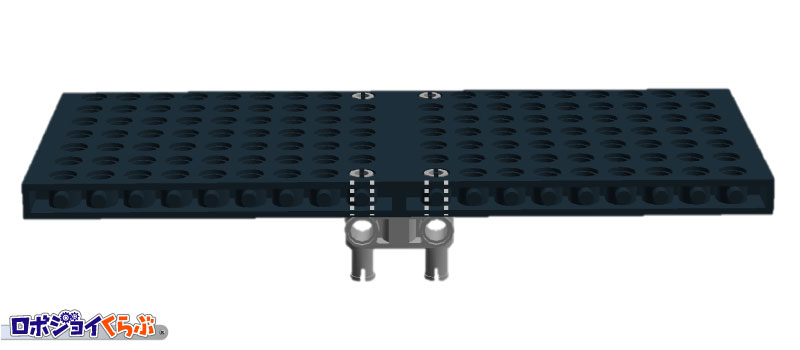
横から見た図


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。