





◆ユニバーサルジョイント仕組み
2つ目のテーマはユニバーサルジョイントです。
ユニバーサルジョイントは、自在軸継手(じざいじくつぎて)とも呼ばれます。軸継手は、軸と軸を連結する場合に使われます。また、必要に応じて取り外すことができるように接続します。
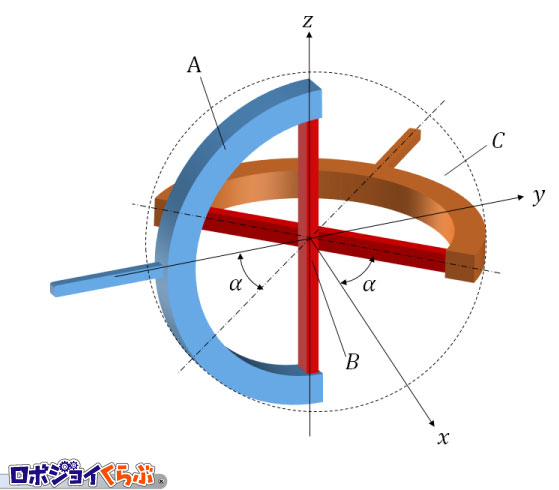
ユニバーサルジョイントは、左図のようにリンクA(青色)とリンクC(オレンジ色)の端が二股になっていて、中央の十字型リンクB(赤色)で結ばれています。
リンクAを回転させると、十字型リンクBでつながれたリンクCが回転します。
また左図では、リンクAとリンクBの接続部とリンクCとリンクBの接続部は回転できるようになっているので軸を傾けることができます。軸の傾斜角αは30度以下にして大きな変化を避けるようにします。
しかし、ユニバーサルジョイントは回転速度が一定ではありません。
片方を1回転させれば、もう片方も1回転しますが、速度が違います。次の条件を満たせば一定の速度で回転させることができます。
・同じ平面内
駆動軸、中間軸、従動軸を同じ平面内に配置します。
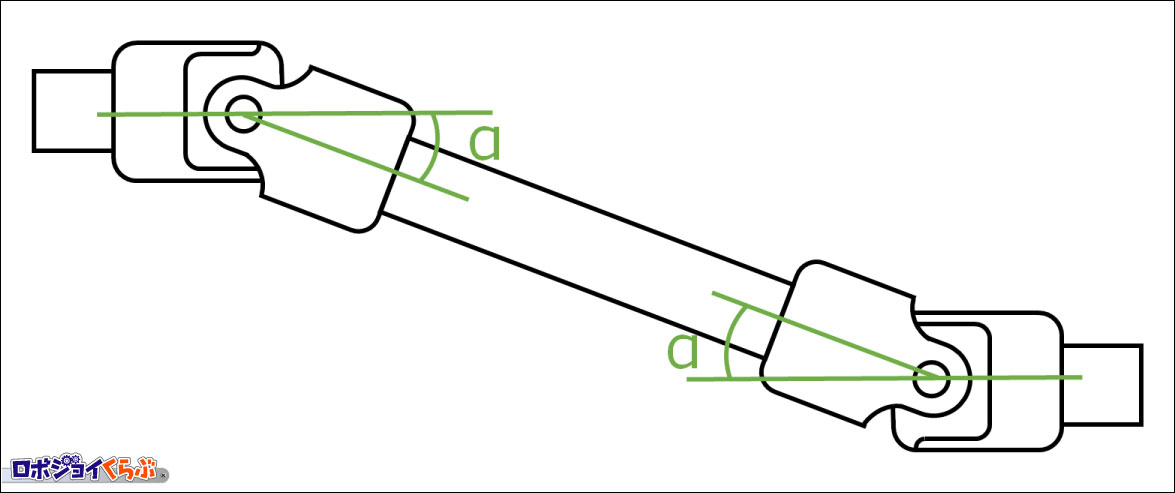
・駆動軸の角度と従動軸の角度が同じ
左図のように角度αを同じにします。角度を大きくしすぎると、回転が伝わらなくなってしまうため30度以下にして大きな変化を避けるようにします。
・同位相
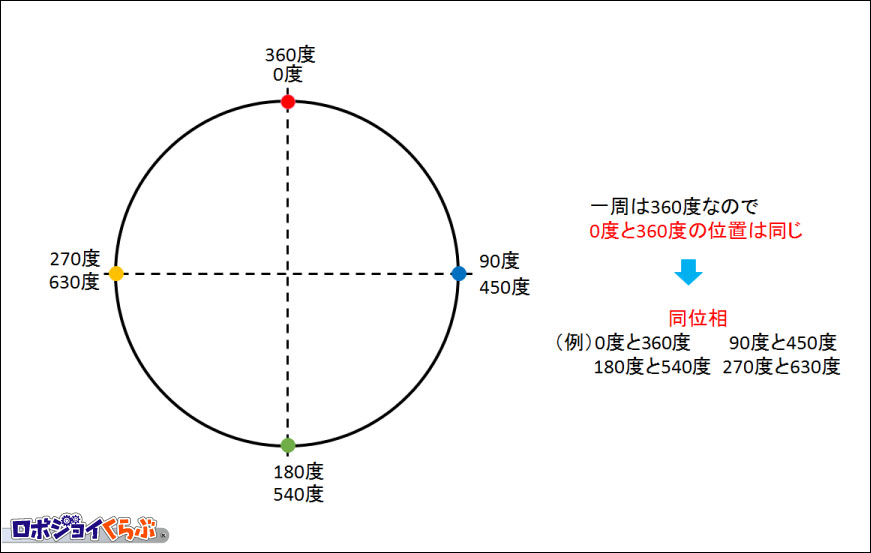
位相とは周期的(ある現象が一定間隔で繰り返される)な運動をするものが、一周期の内のどのタイミングにいるかを表します。
例えば、左図のような回転運動を考えます。
上の赤点を0度とすると360度回転すると一周します。さらに90度回転させると点は合計450度回転し青点の位置になります。つまり、0度と360度の位置、90度と450度の位置、180度と540度の位置、270度と630度の位置は同じになります。このことを同位相といいます。
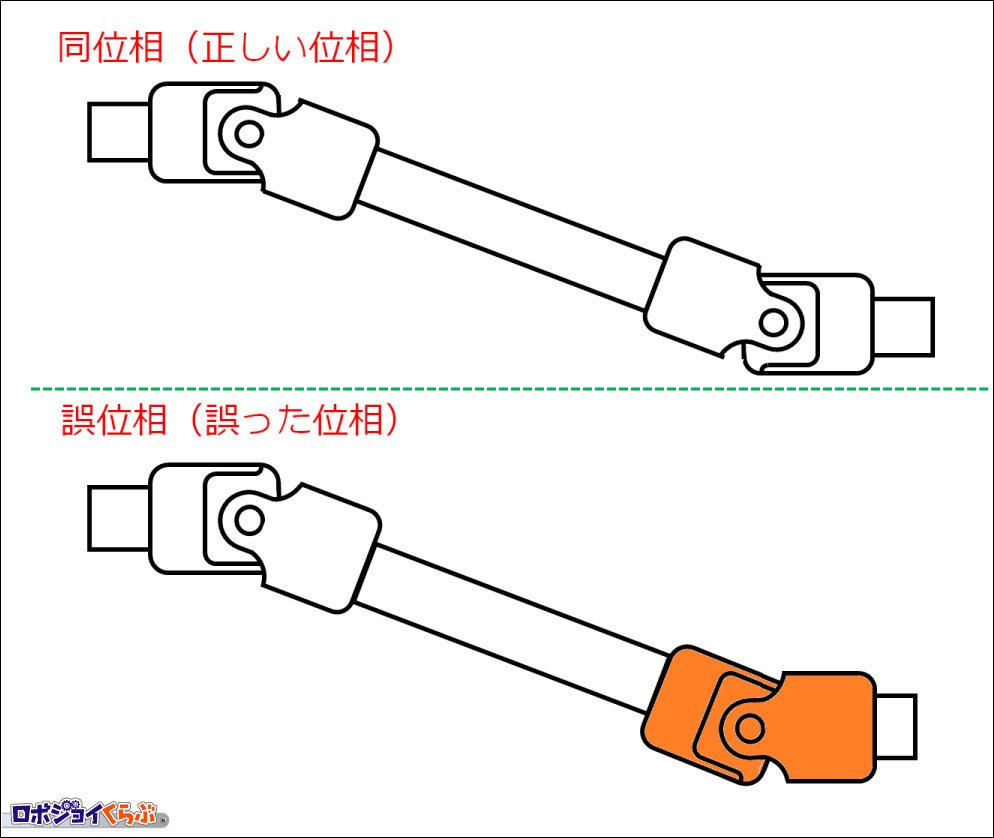
ユニバーサルジョイントの場合、左図のように同位相にすると一定の速度になります。しかし、誤位相のようにつなげてしまうと一定の速度になりません。

このように、ユニバーサルジョイントは同じ直線上にある2つの軸や斜めに交わる2つの軸の間に回転を伝えることができる機構です。
また、伝える軸の角度をある範囲内で自由に変えることができます。
この機構は、自動車のステアリングや三脚などに使用されています。
レゴの部品では左図の部品を指します。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。