





【問題1の答え】
では、答えを見てみましょう。
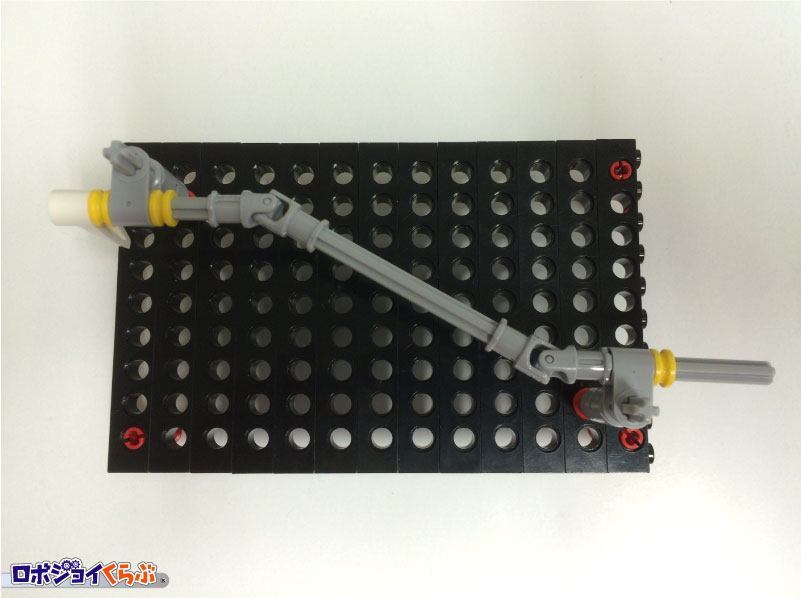
正解は左図のようにユニバーサルジョイントを繋ぎます。
この問題のポイントはユニバーサルジョイントを使用することにあります。
ユニバーサルジョイントによって軸と軸を連結して回転運動を伝えます。
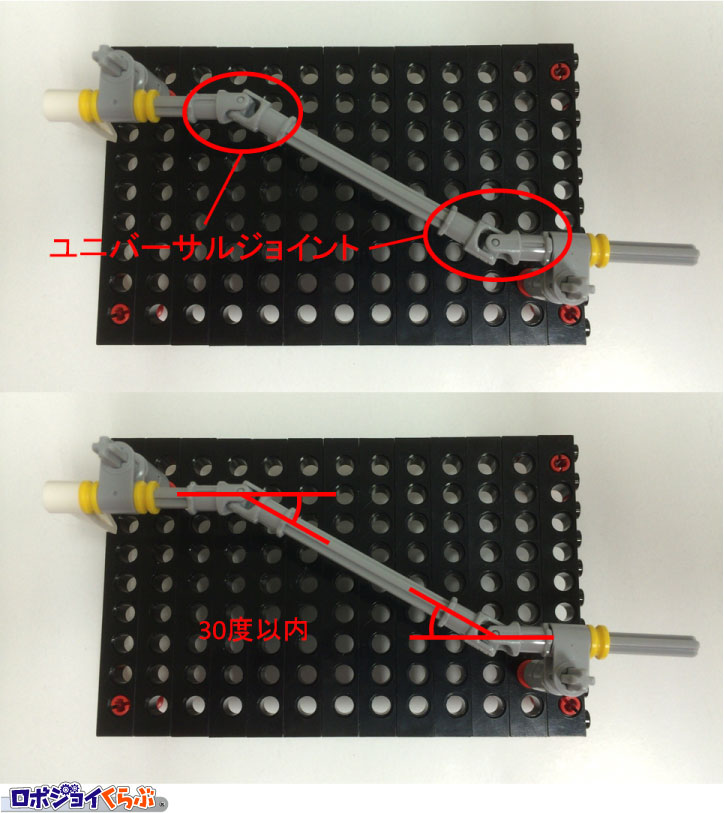
駆動側の軸と従動側の軸が平行になっています。そのため回転を伝えるためには2つのユニバーサルジョイントが必要です。
まず、駆動側の軸にユニバーサルジョイントを取り付け、ある角度分だけ軸を傾けます。
次に、従動側の軸にユニバーサルジョイントを取り付け、同じ角度分だけ軸を傾けます。
この2つのユニバーサルジョイントの間に軸を取り付けることで回転を伝えることができます。
この時、軸間の角度は30度以内にします。30度以内にすることによってスムーズに回転を伝えることができます。
実際に動かした様子はこちら
手で軸を回して、ユニバーサルジョイントやツメの様子を確認してみましょう。
それでは、もう1問。
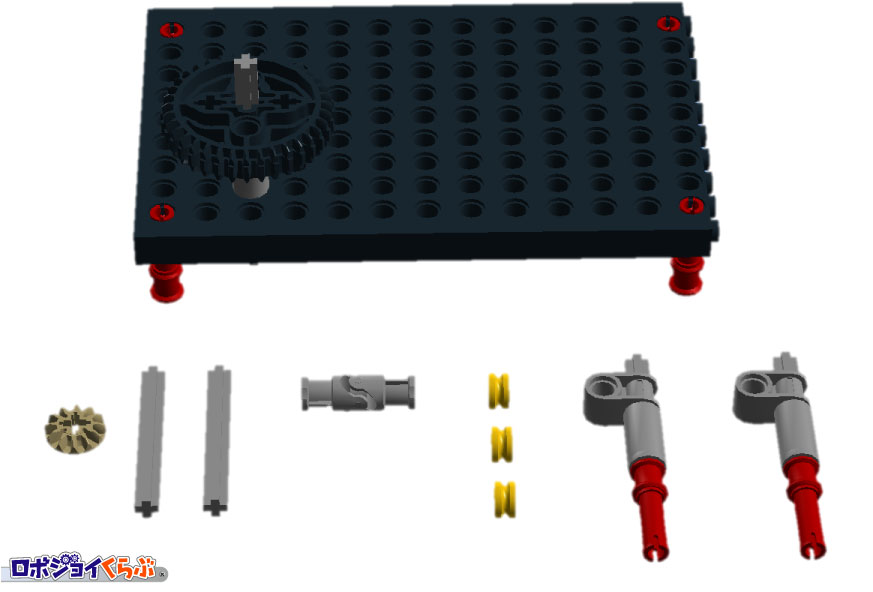
【問題2】
左図のようにユニバーサルジョイントと他のパーツを使用して水平に設置された歯車を動かすにはどのように配置すればよいでしょうか?


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。