





◆ライントレースロボット(P制御)
プログラムを改良しました(Program2)。
「ライントレース入門」でも紹介したP制御(比例制御)を取り入れてみました。
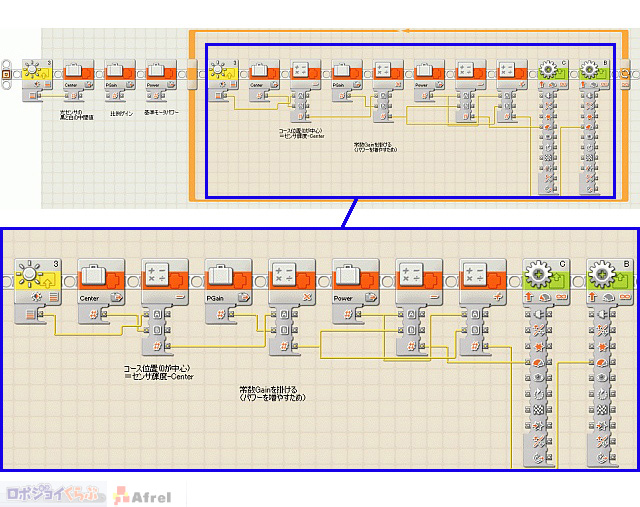
動く原理を図にしてみました。
光センサの位置が「白50:黒50」の状態で、0という値を返すように設定します。その値に対して、比例ゲイン(変数PGain)をかけて、
モータのパワーに伝わります。緑色の矢印がそのパワーです。もし、左側のモータにプラスのパワーが伝わると、
右側のモータにはマイナスのパワーが伝わるように設定します。

光センサを「白50:黒50」の位置に合わせてから、プログラムを実行します。
直線でジグザグに走る現象はなくなりました。しかし、カーブを曲がり続けていくと、ロボットが線からどんどんズレていって、
最後にはテーブルから落ちてしまいました。
この不具合は比例ゲイン(変数PGainの値)を増やせば、一応、解決できるのですが、
そうすると直線での走行でロボットがフラフラしてしまうという副作用が出てしまいます。
この問題の解決方法については、次のページで紹介します。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。