





◆パワーと回転速度の関係

モーターのパワーと角速度の関係をもっと掘り下げてみましょう。
ここでは、パワーを0~100の範囲で変化させて、角速度がどう変化するかをグラフにしてみたいと思います。
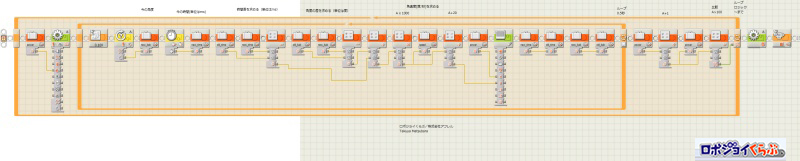
グラフを作成するプログラム(Program-3.rbt)です。
ループが2重になっていますが、内側のループ部分は先ほどのプログラム(Program-2.rbt)とほとんど同じです。
外側のループでは、パワーを0~100の範囲で変化させて、液晶画面に点を描く処理を行っています。
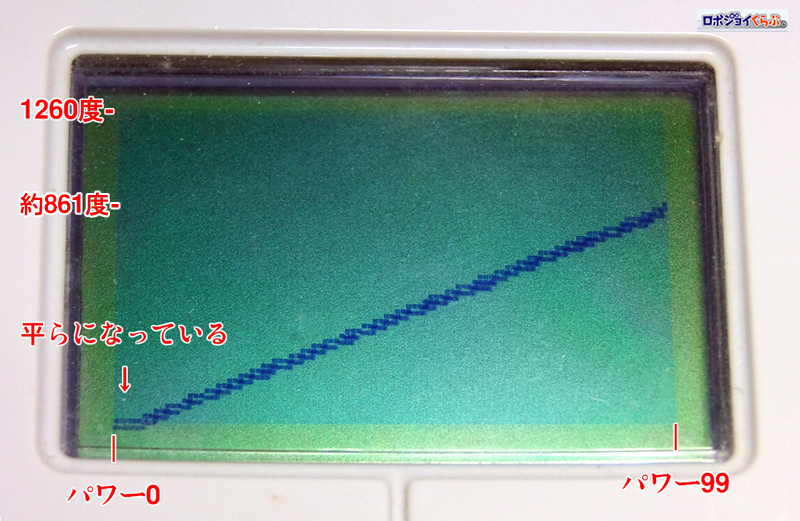
プログラムを実行してみました。
パワーが0から1つずつ上がりながら100になるまでモーターが回ります。実行してから50秒ほど待つと、このようなグラフができあがりました。
グラフの横軸がモーターの「パワー」で、縦軸が「角速度」です。パワーと角速度は比例していて、まっすぐな線が斜めに描かれました。比例しているということは、パワーを2倍にすると回転速度が2倍になるわけです。
なお、このグラフを見ると、 パワーの0~5あたりは平らになっています。これはパワーが足りずに角速度が0だったということです。ある程度のパワーがないとモーターは回ってくれないということが分かります。
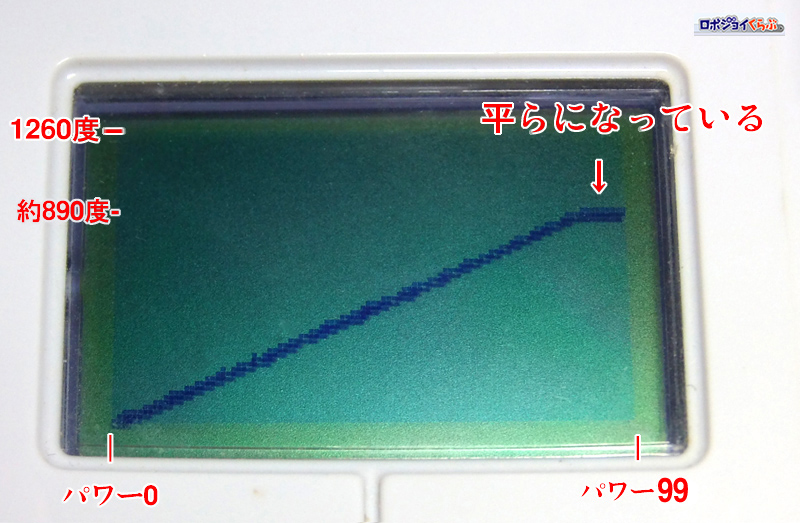
続いて、モーターブロック内の「コントロール モーターパワー」のチェックボックスを「オン」の状態にします。
そして、プログラムを実行すると、このようなグラフが描かれました。 先ほどのパワーコントロールが「オフ」だった時のグラフと比べると、違いがいくつかあります。
「オン」状態では、パワー0~5あたりで回転が止まっているという現象は無くなりました。
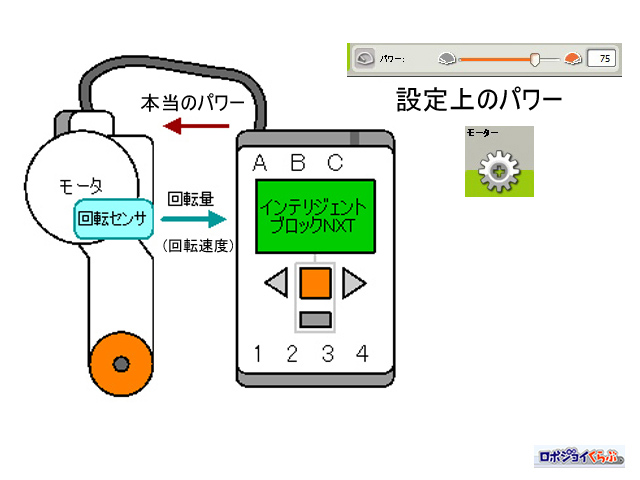
「オン」状態で設定できる「パワー」というのは、ソフトウェア上のパワーであり、回転の速さを意味しています。マイコン側が設定している「本当のパワー」は表面に出てこないので分かりません。
グラフのパワー90~99あたりでモーターの角速度が伸び悩んでいますが、これは「本当のパワー」を100に上げ切っていて、もうこれ以上速度が上がらないという状態に達していると考えられます。これは「オフ」の時にはなかった現象です。
パワーコントロールがどういう働きするか、理解できたでしょうか。
パワーコントロールの「オン」状態では、「パワー」は理論上の回転速度という意味になり、「本当のパワー」が隠されてしまいます。パワーの意味が変わってしまうのです。 パワーコントロールのオン/オフによって、2種類のパワーが存在するわけです。
混乱するので、「パワーコントロールは角速度コントロールである」と考えたほうがよさそうです。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。