





◆レンジャーボットと合体
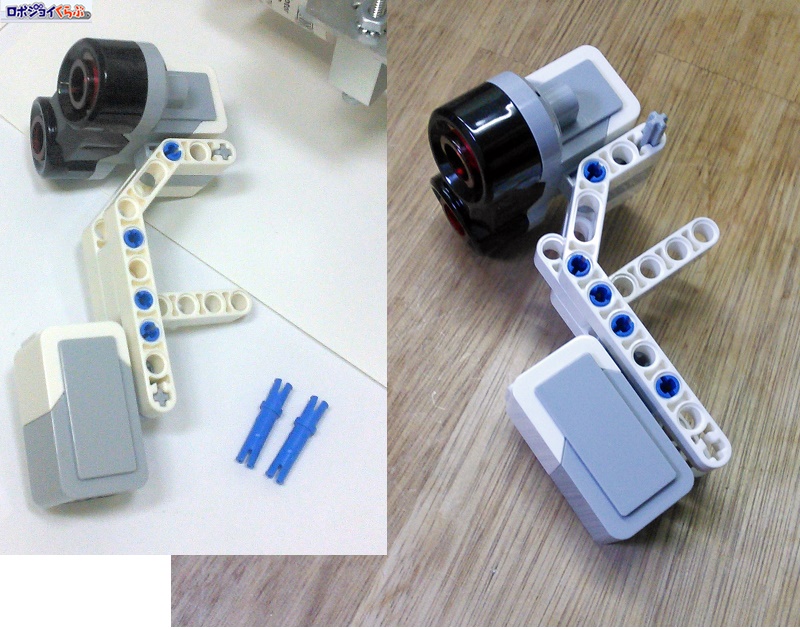
ついでに超音波センサの取り付け方法を改良しました。
左側が改良前のパーツです。この取り付けパーツはEV3に対応させるためのオリジナルだったのですが、位置が高すぎてアームと衝突してしまいます。右が改良後のパーツです。取り付け位置を低くしています。
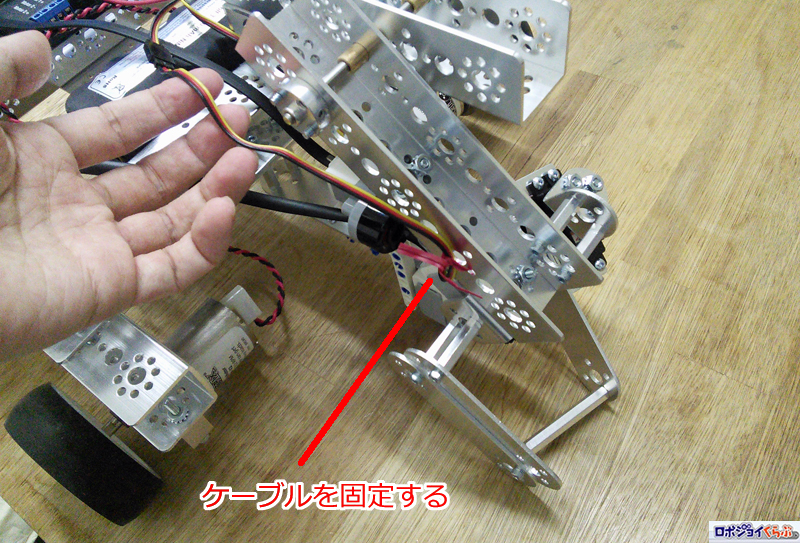
ケーブルが引っかからないように固定しました。
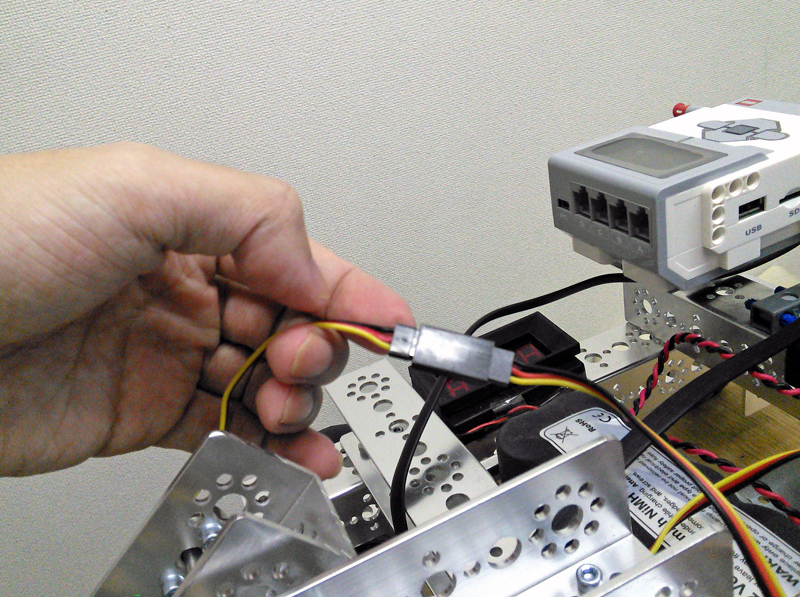
グリッパー用のサーボモータはケーブルの長さが足りません。そこでケーブルを延長しました。
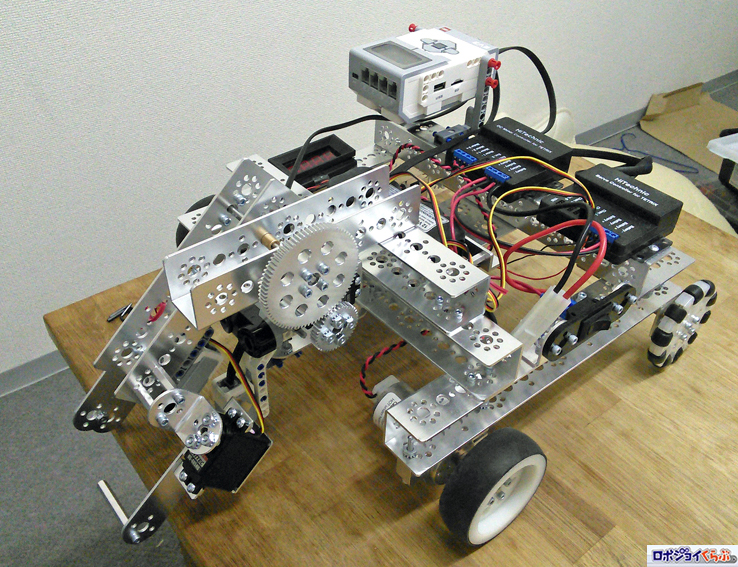
ハードウェアが完成しました。 インテリジェントブロックのポート1にサーボモータ・コントローラをつなぎます。そのサーボモータ・コントローラのポート1にグリッパー用サーボモータをつなぎ、ポート2をグリッパー用サーボモータにつなぎます。
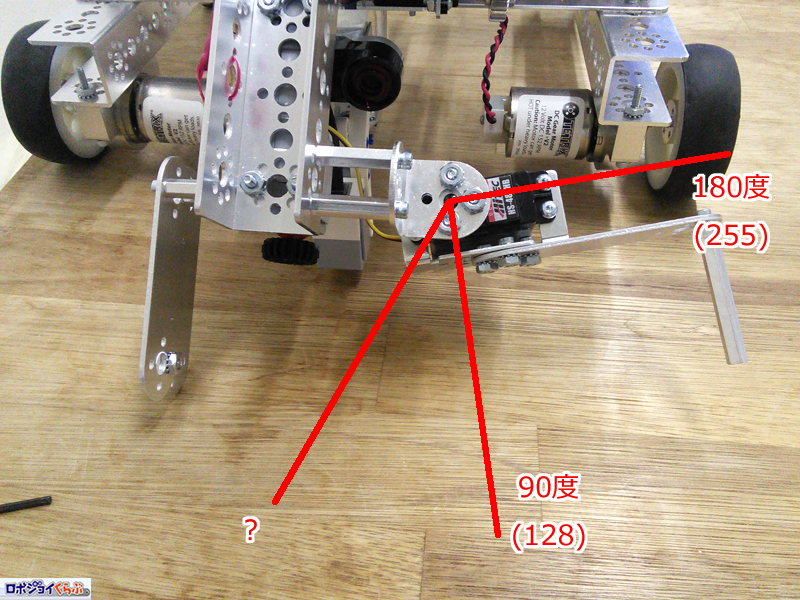
グリッパー用のサーボモータの角度を調整します。
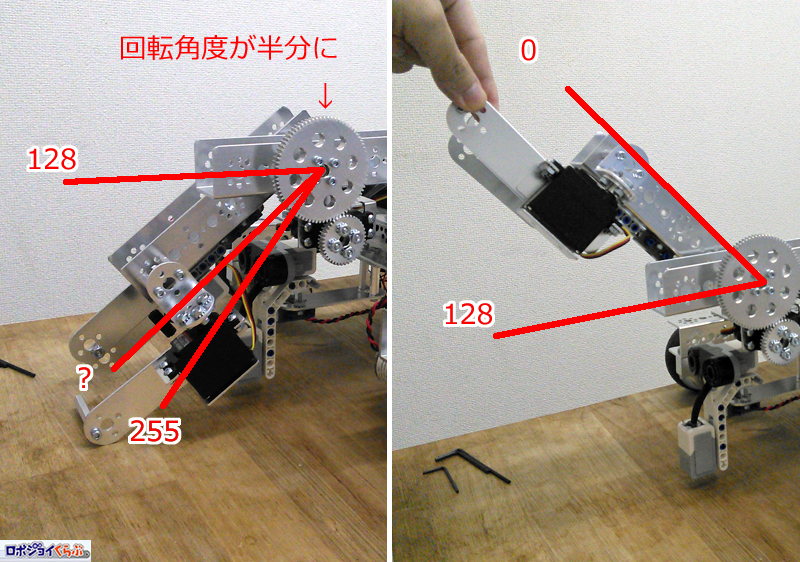
アーム用のサーボモータの角度を調整します。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。