




Line Trace Robot (zigzag running)
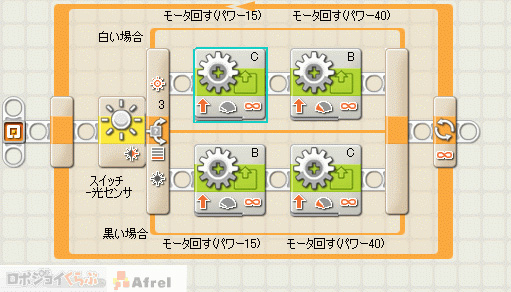
As long as it comes up with the simplest program of line tracing robot (Program1).
By using the switch block, it branches depending on the value of the light sensor. By alternately turning the two motors, it goes over the line.
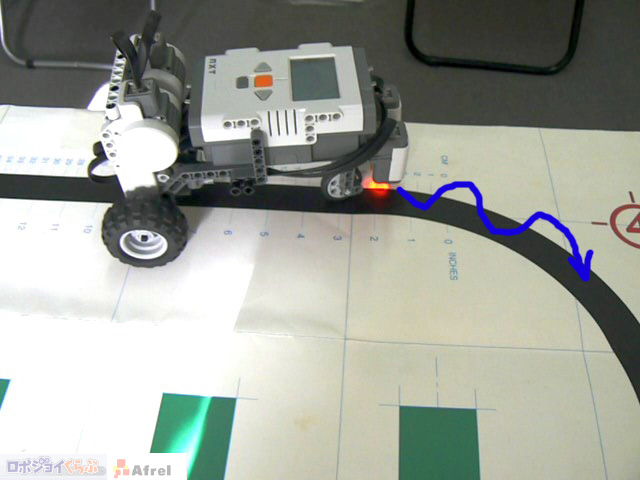
It is a consequence of the running program. Robot will advance to zigzag on the line.
Since it moves a zigzag motion, not seems very efficient. It is too slow to use in competition.
If you look in terms of hardware, "Hajimete-Robot" is not very suitable as the line trace robot. The tire is away from the center of gravity, it is less likely to turn. I would like to try to solve these problems in the software.











Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.