




Line tracing robot (using two light sensors)
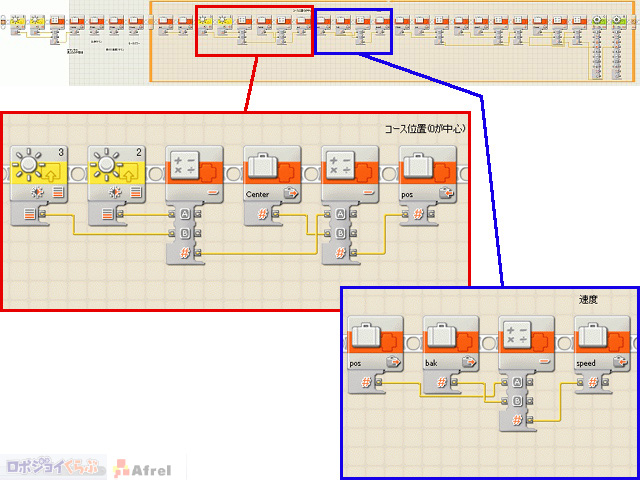
I further to improve the program (Program4).
I use two light sensors to counteract the "unevenness of brightness."
One of light sensors as plus component, another light sensor as minus component determines the value depending on the position of the line.
Put the light sensors in a state across the line, if the sensor is out of line the balance of the amount of reflection is lost, the light sensor value is inclined to plus or minus plus.
This way, even after bright and dark around, the difference between the light sensors do not change.
By using two light sensors, there is also a benefit of wider measurement range.
"If you use only one sensor" left of the figure, and "if you use two sensors" on the right. Use two sensors can be detected a wide range of the black line.
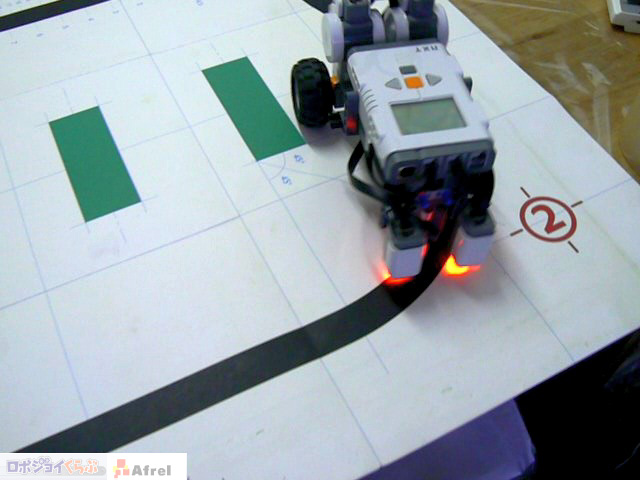
Align the black line in the center of the two light sensors, I run the program.
By spreading the detection range, performance chasing a black line is up significantly.
It was able to run without problems to increase about 50 percent more power (power variable) of the motor.
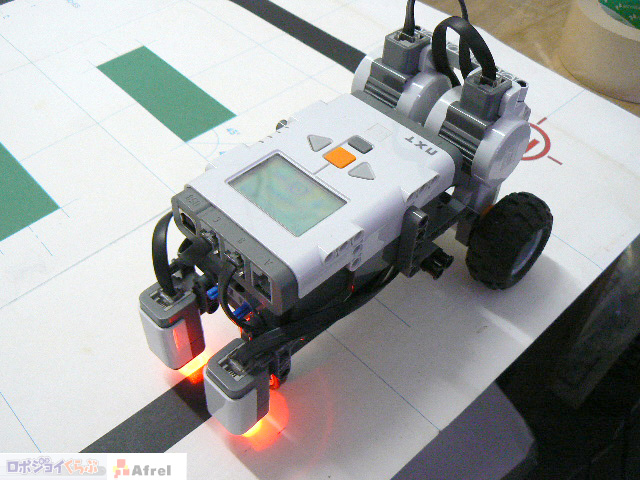
It can now also support the "unevenness of brightness." By using the type of lamp stand as a trial, I tried to place it close or keep away to the robot , it runs without any problems.
I think the line tracing is a Fixture in the world of robot competitions, this program is very useful.











Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.