





◆動作テスト用のプログラム2
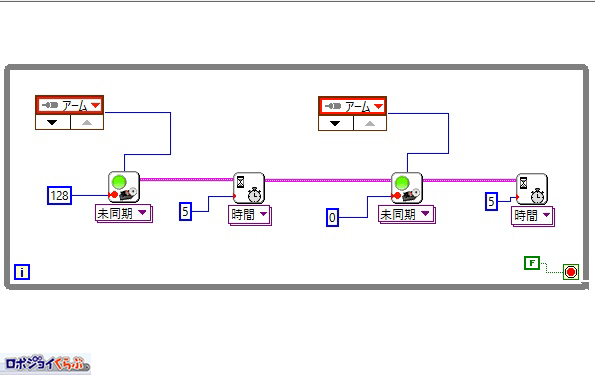
プログラム2です。5秒おきにアームが動きます。
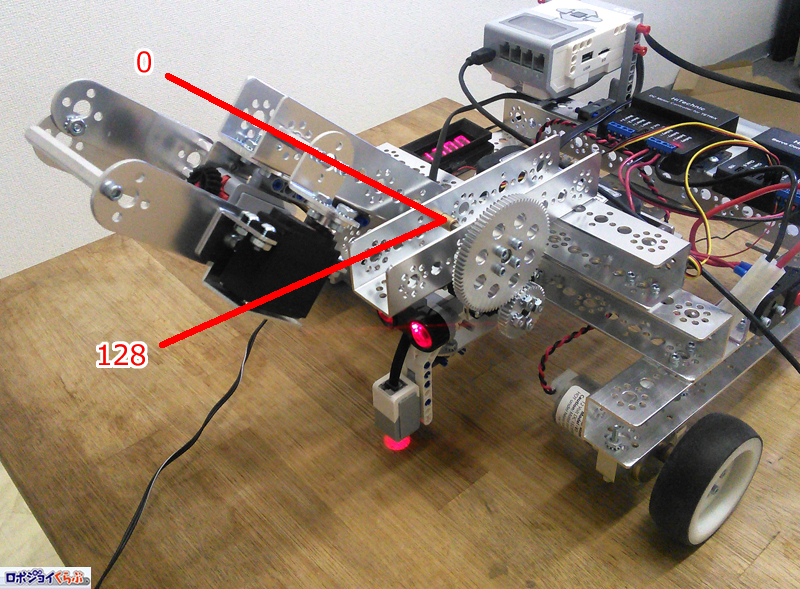
実行後の様子です。 サーボパラメータが0の状態です。 0度の位置にアームが動きます。
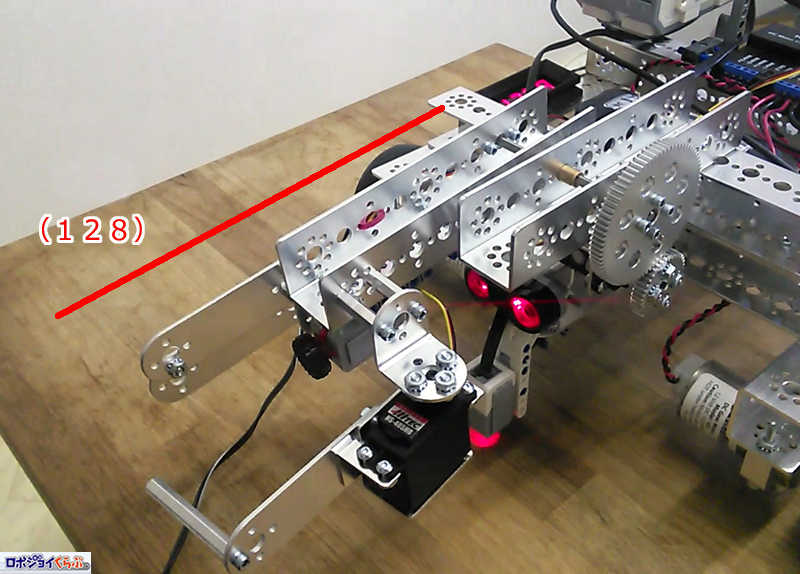
サーボパラメータが128の状態です。90度の半分=45度相当の位置にアームが動いています。
繰り返しになりますが、「危ない」と思ったら、すぐにDC12Vの電源を切ってモータを脱力させましょう。サーボモータにムリな動きが加わった場合も同様です。危険をしっかり見極めて、安全にロボット作りを楽しみましょう。

正規代理店

Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。