




レゴマインドストームNXT(以下、NXTと呼びます)を使ったロボット作りの基本的なノウハウを紹介していきます。前回に紹介した「歩行ロボット」は前後に進むだけで芸がありませんでした。そこで今回は自由自在に動けて、さらに物がつかめるロボットを作ってみたいと思います。(文/松原拓也)
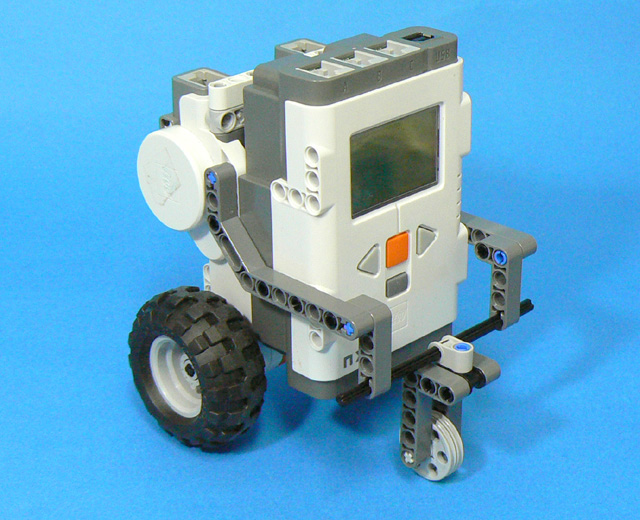
こちらがロボットの土台となる部分です。
2つのモーターとインテリジェントブロックをアームで接続しただけのシンプルな3輪車です。
タイヤの1つはキャスターになっています。
この3輪車は「グレーブック」という書籍にも登場しますので、興味のある人は読んでみてください(宣伝)。
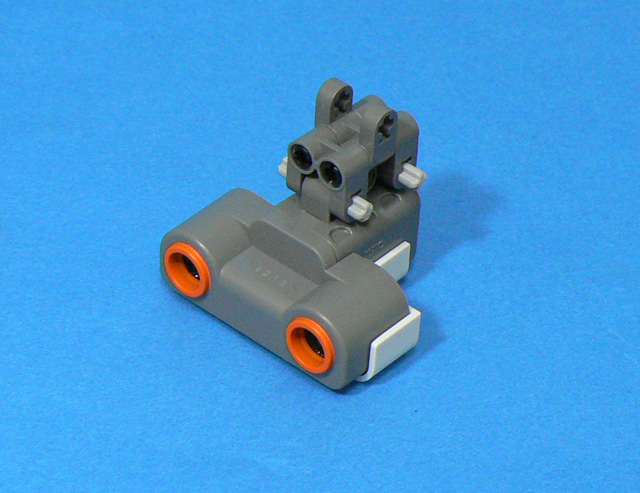
そして、ロボットの目となる超音波センサーです。
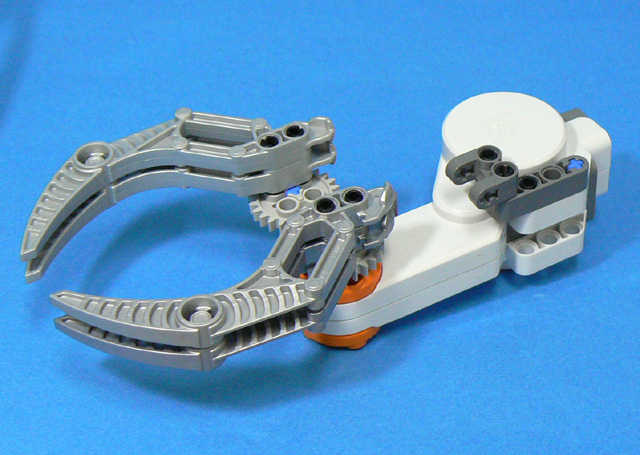
それから、ロボットの手の部分です。 16歯ギヤを2つ使って、指が左右に開いたり閉じたりできるようにしています。

すべてを組み合わせた様子です。これでハードウェアは完成です。
ケーブルは次のように接続してください。
出力ポートA:右タイヤのモーター
出力ポートB:左タイヤのモーター
出力ポートC:手のモーター
入力ポート1:超音波センサー
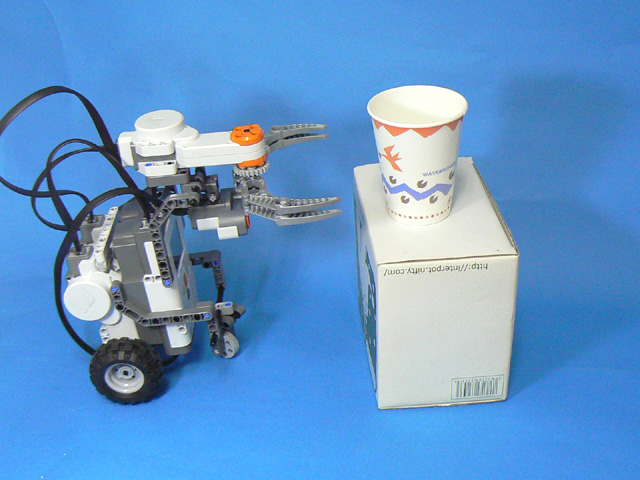
このロボットは構造的にあまり重たいものはつかめませんので、紙コップを用意してみました。このコップをつかめるようにプログラムを作ってみます。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。