




◆手の開閉
いきなり全部のプログラムを作るのは大変なので、簡単そうなところから順番に作っていきます。
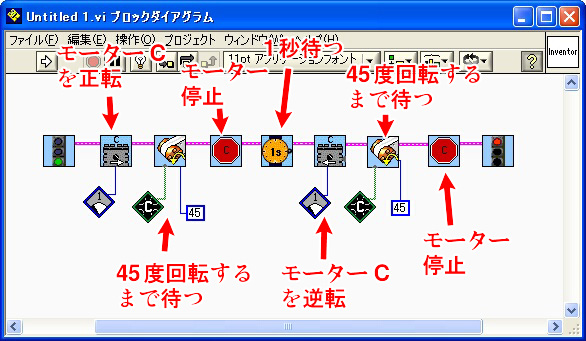
こちらが手を開閉させるだけのプログラムです。プログラミングには「Robolab2.9」を使ってみました(どういうわけか、教育現場ではNXTソフトウェアよりもRobolabを使っている場合が多いようです)。
処理の手順は次のとおりです。
・(1)「開始」:プログラムを開始させます。
・(2)「モーターC順回転」:モーターCを正転させます。これで手が開きます。
・(3)「NXT回転を待つ」:ある目的の角度になるまでプログラムの処理を待ちます。ここでは、角度が45度になるまで待ちます。
・(4)「停止C」:モーターの回転を止めます。
・(5)「1秒待つ」:1秒間、処理を止めます。
・(6)「モーターC順回転」:モーターCを逆転させます。処理2の時と回転方向が逆です。これで手が閉じます。
・(7)「NXT回転を待つ」:ある目的の角度になるまでプログラムの処理を待ちます。ここでは、角度が45度になるまで待ちます。
・(8)「停止C」:モーターCの回転を止めます。
・(9)「終了」:プログラムを停止させます。
[DOWNLOAD]作成したプログラム(Robolab2.9用)

手が閉じた状態でプログラムを実行させます。
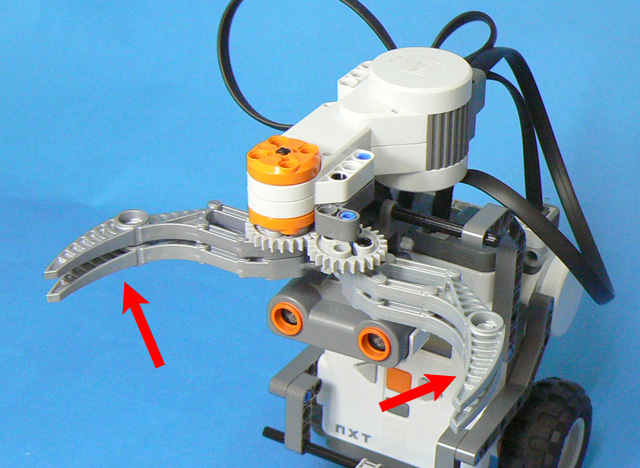
実行させると手が開きます。そして、 1秒後に手が閉じます。成功です。


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。