





ここでは、教育版レゴ マインドストームEV3のパーツを使って、ロボット競技にも役立つ色々な機構を学習していきます。
最終的には、ロボット競技でよく登場する“ある動き”のしくみが分かるようになることを目指します。
今回は、「カム」と「ラックアンドピニオン」を使った機構を説明していきます。
※説明のイラストが見にくい場合は、イラストをクリックすると大きなサイズで見ることができます。
◆カムを使った仕組み
カム機構は、カムの形状に基づいて目的に適した運動する機構です。
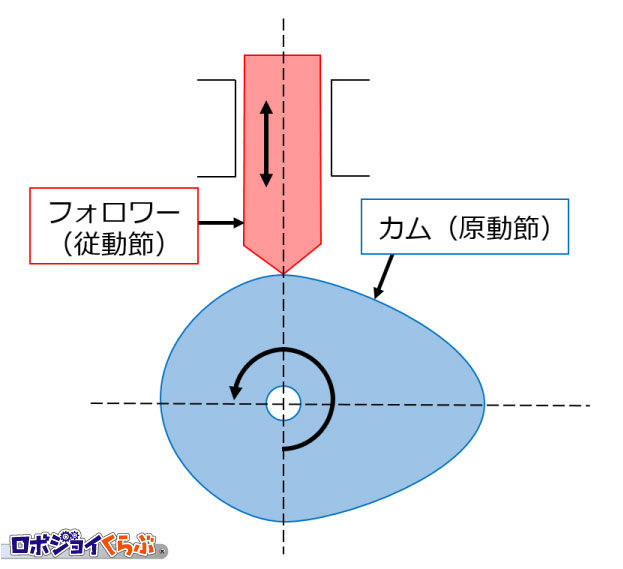
カム機構は、左図のようにカムと呼ばれる原動節と、フォロワーと呼ばれる従動節で構成されています。
カム機構の特徴は、カムの直進または回転運動を、従動節の任意の直進または回転運動に変えることです。
それでは、カム機構の運動を見てみましょう。
下図のように、カムを回転させると従動節はカムの形状に沿って上下の往復運動をします。
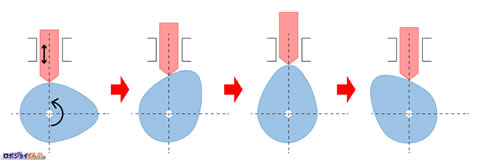
このようにカム機構では、カムを特殊な形状にすることで、従動節に目標とする運動をさせることができます。
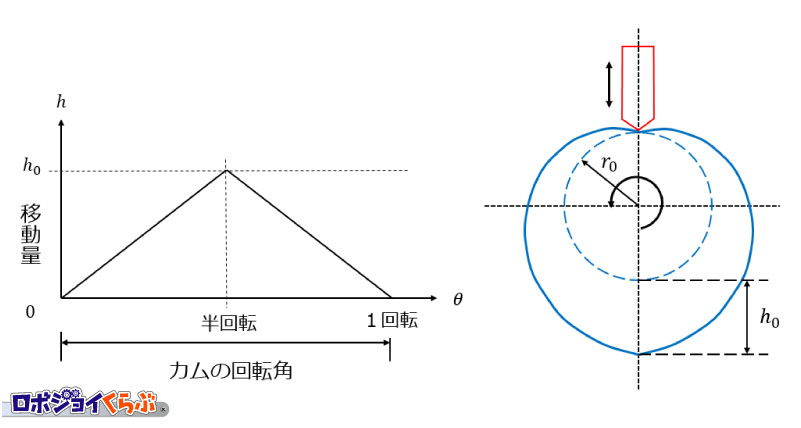
従動節に目標とする運動をさせるためには、カムの回転角と回転角に対する従動節の位置関係を知る必要があります。
カムの回転角と従動節の位置関係を表した左図のグラフをカム線図といいます。
横軸がカムの回転角、縦軸が従動節の移動量を表しています。
カム線図を見ると、カムが半回転するまで一定の割合で従動節の移動量が増加していることが分かります。
これは、従動節が徐々に上に上がっていることを表しています。
カムが半回転し終わると、次はカムが1回転するまで一定の割合で従動節の移動量が減少していることが分かります。
これは、上に上がっていた従動節が徐々に下に下がっていることを表しています。
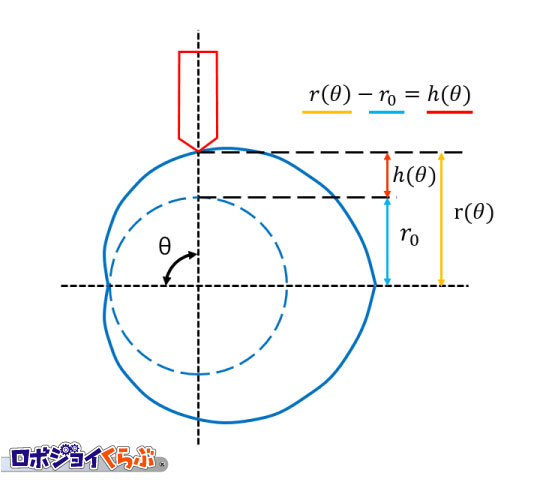
これを式で表すと、
r(θ)-r0=h(θ)
となります。
ここで、各変数の説明を以下に示します。
r(θ) ・・・円の中心点から従動節とカムの接点との距離
r0 ・・・ 点線で描かれた円の半径
h(θ) ・・・ 半径r_0の円と従動節とカムの接点との距離


Copyright 2012 Afrel Co.,Ltd. All Rights Reserved.
(R) LEGO, the LEGO logo, MINDSTORMS and the MINDSTROMS logo are trademarks of the LEGO Group.
(C) 2012 The LEGO Group.
レゴ、レゴのロゴマーク、レゴ マインドストームは、レゴグループの登録商標です。